Unified Humanoid Get-Up (UHG) is the open-source artifact for our RoboCup 2025 paper “Learning to Get Up Across Morphologies: Zero-Shot Recovery with a Unified Humanoid Policy.” (paper)
Built on the original FRASA framework, UHG:
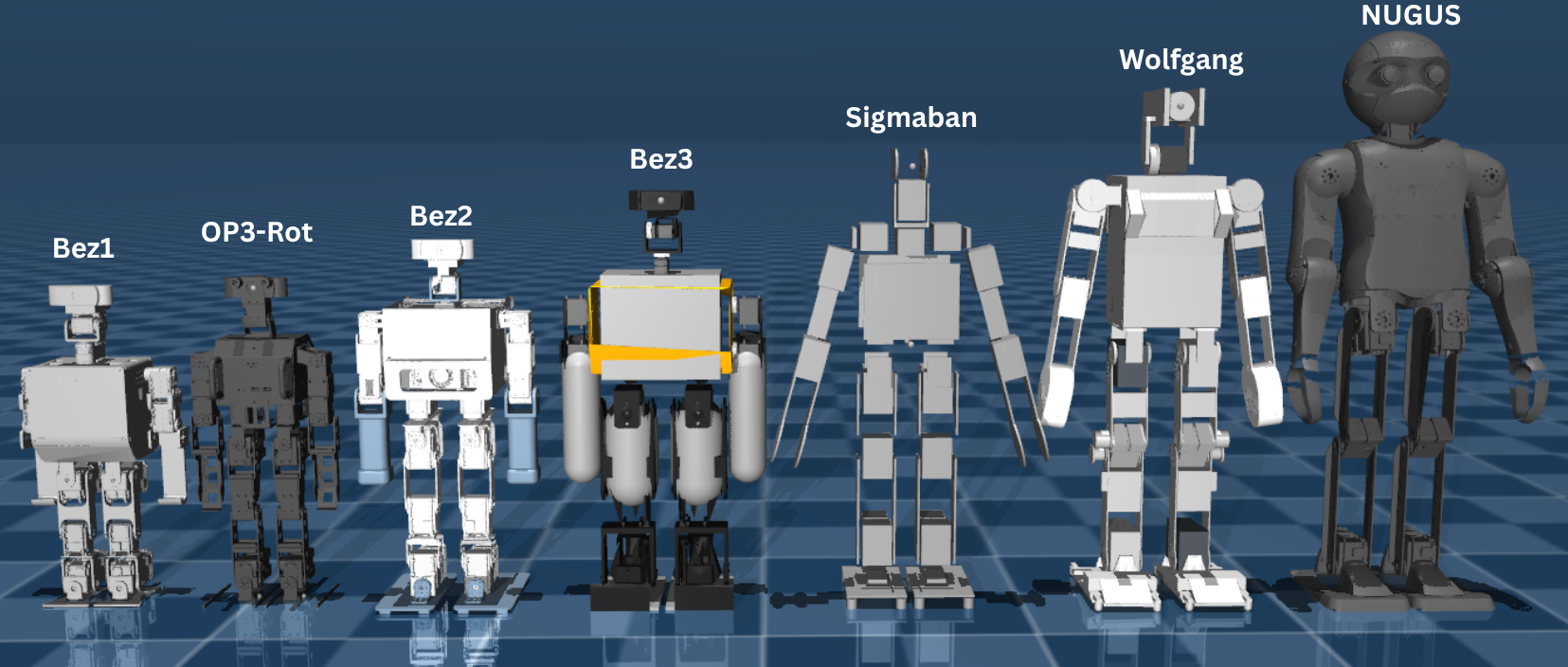
- Adds six new MJCF models—Wolfgang, NUGUS, Bez1, Bez2, Bez3, and OP3-Rot (7 robots total).
- Generalises the reward function so one policy can recover from prone or supine falls on any robot without per-model tuning.
- Packages a Gym/MuJoCo environment and CrossQ training pipeline (stable-baselines3 library).
Everything you need to train, evaluate, or extend a zero-shot humanoid get-up policy lives in this repository.
The humanoid platforms used for this project are shown below.
The performance of the trained agent has been validated in MuJoCo, as demonstrated in the examples below:

First of all, you need to install RL Baselines3 Zoo to train and enjoy agents:
pip install rl_zoo3
Then, you can install unified_humanoid_get_up_env from source using the following command:
pip install -e .
If you get jax errors run:
pip install --upgrade "jax[cuda12_local]==0.5.3"
sudo apt install nvidia-cudnn
⚠ Wayland + GLFW freeze fix
If you are using Wayland (instead of X11), you may encounter issues with the MuJoCo viewer,
such as frozen windows or buttons not working. To solve this, you can build
GLFW from source with shared libraries and set the LD_LIBRARY_PATH and
PYGLFW_LIBRARY environment variables to point to the built libraries.
-
Download source package here and unzip it: https://www.glfw.org/download.html
-
Install dependancies to build GLFW for Wayland and X11
sudo apt install libwayland-dev libxkbcommon-dev xorg-dev
- Go to the glfw extracted folder and use the following cmake command to build it with shared libs
cd path/to/glfw
cmake -S . -B build -D BUILD_SHARED_LIBS=ON
- Build GLFW from source
cd path/to/glfw/build
make
- Change LD_LIBRARY_PATH and PYGLFW_LIBRARY to match GLFW version you built and add it to your bashrc
export LD_LIBRARY_PATH="LD_LIBRARY_PATH:path/to/glfw/build/src/"
export PYGLFW_LIBRARY="path/to/glfw/build/src/libglfw.so"
Pre-generating initial positions for the standup environment is recommended, as it can be time-consuming to generate them during training. To do so, you can use the standup_generate_initial.py script:
# TODO add option to pass robot type and rewrite this section
python standup_generate_initial.pyIt will generate initial positions by letting the robot fall from random positions
and store them in unified_humanoid_get_up_env/env/standup_initial_configurations.pkl.
Let the script run until you have collected enough initial positions
(typically a few thousand). You can stop the script at any time using Ctrl+C;
the generated positions will be saved automatically.

You can use the test_env.py script to test the environment:
# Start the environment without action # TODO add option to pass robot type
python test_env.py
# Start the environment with noise on the actions
python test_env.py --normal --std 2You can train an agent using:
# TODO add more instructions
python3.10 train_sbx.py \
--algo crossq \
--env unified-humanoid-get-up-env-standup-v0 \
--conf hyperparams/crossq.yml \
--env-kwargs robot_name:['bez2']Where the arguments are:
algo: The RL algorithm to useenv: The environment to train onconf: The hyperparameters file to useenv-kwargs: List of robots to use
The hyperparameters for the environment are defined in hyperparams/[algo].yml.
The trained agent will be stored in logs\[algo]\[env]_[exp-id].
Can also use multi_train.py to automate training.
If a trained agent exists, you can see it in action using:
python3.10 enjoy_sbx.py \
--algo crossq \
--env unified-humanoid-get-up-env-standup-v0 \
--gym-packages unified_humanoid_get_up_env \
--folder logs/ \
--load-best \
--exp-id 0 \
--env-kwargs robot_name:['bez2']
Where the arguments are:
algo: The RL algorithm to useenv: The environment to enjoy ongym-packages: The gym package used to register the environmentfolder: The folder where the trained agent is storedload-best: Used to load the best agent.exp-id 0: The experiment ID to use (0meaning the latest).env-kwargs: List of robots to use
Can also use collect_data.py to automate running the model on a customizable scenario.
run the notebook in analysis.
Model & Environment
Humanoid Model
The MuJoCo XML model of this robot is located in the unified_humanoid_get_up_env/mujoco_simulator/model folder.
For a detailed description of the process to convert URDF to MuJoCo XML, see the README in the model directory.
Stand Up Environment
The stand up environment can be found in unified_humanoid_get_up_env/env/standup_env.py.

The environment simplifies the learning process by controlling only the 5 DoFs presented on the right (elbow, shoulder_pitch, hip_pitch, knee, ankle_pitch). These are the primary joints involved in recovery and standing movements in the sagittal plane
At the start of each episode, the robot’s joint angles
An episode termination occurs when the robot reaches an unsafe or irreversible state:
- Trunk pitch (
$\theta$ ) exceeds a predefined threshold, indicating the robot is upside down. - Trunk pitch velocity (
$\dot{\theta}$ ) surpasses a critical threshold, suggesting very violent displacements of the pelvis.
An episode is truncated if its duration exceed a predefined maximum duration. This allows for an increase in the diversity of encountered states.
The robot can be controlled using 3 modes: position, velocity and error. The recommended and used control mode for the experiments in the paper is velocity. This mode interprets the actions as the rate of change for the desired joint angles, ensuring smooth and adaptive movements.
Observation & Action Space
The observation space for the StandupEnv captures key elements of the robot's posture, movements, and control state. It includes:
| Index | Observation | Range | Description |
|---|---|---|---|
| 0-4 | q |
[-π, π] | Joint angles for the 5 degrees of freedom (elbow, shoulder_pitch, hip_pitch, knee, ankle_pitch) |
| 5-9 | dq |
[-10, 10] | Joint angular velocities for the 5 DoFs |
| 10-14 | ctrl |
Actuator control range | Actuator control values for the joints |
| 15-17 | tilt |
[-π, π] | Trunk Euler angles |
| 18-20 | dtilt |
[-10, 10] | Trunk angular velocities |
| 20+ | previous_actions |
Action space range | History of the most recent actions, defined by options["previous_actions"] |
The action space specifies control commands for the robot's 5 joints. Its structure depends on the control mode (position, velocity, or error) specified in options["control"].
| Mode | Description | Range | Notes |
|---|---|---|---|
position |
Absolute joint positions | [range_low, range_high] | Actuator range defined in the model/robot.xml |
velocity |
Rate of change for joint positions | [-vmax, vmax] | Maximum velocity vmax is 2π rad/s |
error |
Desired deviation from current joint positions | [-π/4, π/4] | Represents a proportional error to adjust the current state |
In all modes, the action space corresponds to the robot's 5 controlled joints.
Reward Function
Reward
The reward function incentivizes the robot to achieve and maintain the desired upright posture while avoiding abrupt movements and collisions. It is defined as:
$$ R = R*{Up} + R*{Pitch} + R*{Velocity} + R*{Variation} + R_{Collision} $$
- Up Reward
The up reward
$$ R_{Up} = \text{exp}\left(-10 \cdot \left| h_t^{head} - 1.0 \right|^2 \right) $$
- Pitch Reward
The pitch reward
$$ R_{Pitch} = 1 \cdot [h_t^{head} > 0.4] \cdot \text{exp}\left(-10 \cdot \left| \theta_t^{pitch} \right|^2 \right) $$
- Velocity Reward
The velocity reward
$$ R_{Pitch} = 0.1 \cdot \text{exp}\left(- \left| \dot q_t \right|^2 \right) $$
- Variation Penalty Reward
The variation penalty reward
$$ R*{Variation} = 0.05 \cdot \text{exp}\left( -\left| a_t - a*{t-1} \right| \right) $$
Where
- No Self-collision Reward
The no self-collision reward
$$ R_{collision} = \text{exp}\left(-\text{collisions()} \right) \cdot 0.1 $$
Where collision() corresponds to sim.self_collisions() function.
Note that additional penalties and smoothness incentives are applied depending on the control mode. For a detailed implementation, please refer to the source code in unified_humanoid_get_up_env/env/standup_env.py.
Env Options
The StandupEnv environment includes a variety of configurable options to tailor the training and evaluation process. Below is a description of the key parameters:
| Option | Description | Default Value |
|---|---|---|
stabilization_time |
Duration of the stabilization pre-simulation to let the robot stabilize under gravity (in seconds) | 2.0 |
truncate_duration |
Maximum duration of an episode before truncation (in seconds) | 5.0 |
dt |
Time interval for applying agent control commands (in seconds) | 0.05 |
vmax |
Maximum command angular velocity for the robot's joints (in rad/s) | 2 * π |
render_realtime |
If True, rendering occurs in real-time during simulation |
True |
desired_state |
Target state for the robot, defined as joint angles and IMU pitch (in radians) | [-49.5°, 19.5°, -52°, 79°, -36.5°, -8.5°] |
reset_final_p |
Probability of resetting the robot in its final (stable) position | 0.1 |
terminate_upside_down |
Whether to terminate the episode if the robot is upside down | True |
terminate_gyro |
Whether to terminate the episode based on abnormal gyroscopic readings | True |
terminate_shock |
Whether to terminate the episode due to excessive shocks or impacts | False |
random_angles |
Randomization range for initial joint angles (in degrees) | ±1.5 |
random_time_ratio |
Randomization range for time scaling during simulation | [0.98, 1.02] |
random_friction |
Randomization range for surface friction | [0.25, 1.5] |
random_body_mass |
Randomization range for body part masses (relative ratio) | [0.8, 1.2] |
random_body_com_pos |
Randomization range for the center of mass positions (in meters) | ±5e-3 |
random_damping |
Randomization range for joint damping (relative ratio) | [0.8, 1.2] |
random_frictionloss |
Randomization range for friction loss (relative ratio) | [0.8, 1.2] |
random_v |
Randomization range for voltage supply to the motors (in volts) | [13.8, 16.8] |
nominal_v |
Nominal voltage supply to the motors (in volts) | 15 |
control |
Type of control applied to the robot: position, velocity, or error |
velocity |
interpolate |
Whether to interpolate control commands for smoother execution | True |
qdot_delay |
Delay applied to joint velocity feedback (in seconds) | 0.030 |
tilt_delay |
Delay applied to tilt angle feedback (in seconds) | 0.050 |
dtilt_delay |
Delay applied to tilt velocity feedback (in seconds) | 0.050 |
previous_actions |
Number of previous actions considered for state representation | 1 |
These options can be customized by passing a dictionary of parameters to the environment during initialization. Example:
env = StandupEnv(options={
"truncate_duration": 10.0,
"random_angles": 2.0,
"terminate_shock": True
})If you use or refer to this repository in your research, please cite:
@inproceedings{spraggett2025unihum,
author = {Jonathan Spraggett},
year = {2025},
month = {07},
booktitle = {RoboCup Symposium},
title = {Learning to Get Up Across Morphologies: Zero-Shot Recovery with a Unified Humanoid Policy}
}Licensed under the MIT license (see LICENSE).
This repo builds on FRASA © 2024 Clément Gaspard et al.