Drone-based Multi-Object Tracking Combining Camera Motion Information and Single Object Tracking. (ICGNC 2024)
For Drone-based Multi-Object Tracking (DbMOT), camera motion makes it challenging to maintain accurate object prediction and tracking on the 2D image plane. DbMOT is a ROS node which leverages camera motion information to predict object motion in the 3D space and back-project on the 2D image plane, resulting in more robust and stable data association. Additionally, DbMOT integrates a single object tracker, utilizing object motion prediction to guide its search region for enhanced tracking stability.
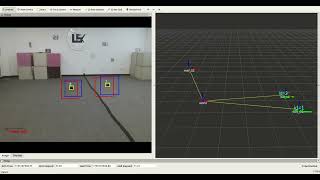
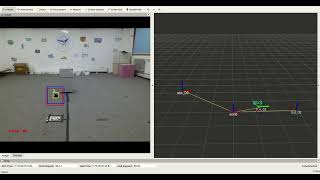
Real-World Experiments:
Simulation:
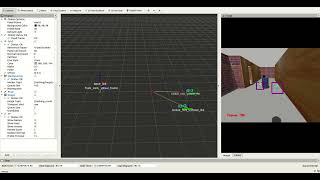

The process of compensating for the search regions in simulation (above) and real-world experiments (below). The blue box represents the original search region of single object tracker, while the red box represents the adjusted search region.


- See INSTALL.md for details of installing required components.
- See DETECTOR.md for quickly usage of an off-the-sheld detector ROS node.
- See TRACKERS.md for quickly usage of tracking ROS nodes.
- See DATA.md for usage of simulations and real-world experiments data.
If you publish work based on, or using, this code, we would appreciate citations to the following:
@inproceedings{fang2024drone,
author = {Fang, Bohui and Shao, Weiyu and Zheng, Yuhang and Yang, Tao},
title = {Drone-Based Multi-object Tracking Combining Camera Motion Information and Single Object Tracking},
booktitle = {Advances in Guidance, Navigation and Control},
month = {Auguest},
year = {2025},
publisher = {Springer Nature Singapore},
address = {Singapore},
pages = {544--553},
}
The codebase is built upon npurobocourse_sim, f1tenth, DeepSORT, UCMCTrack, YOLOv8, and CSRT-tracker-standalone. We thank their wondeful works.