ROS Distros:
![]()
![]()
![]()
![]()
Python Bindings:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
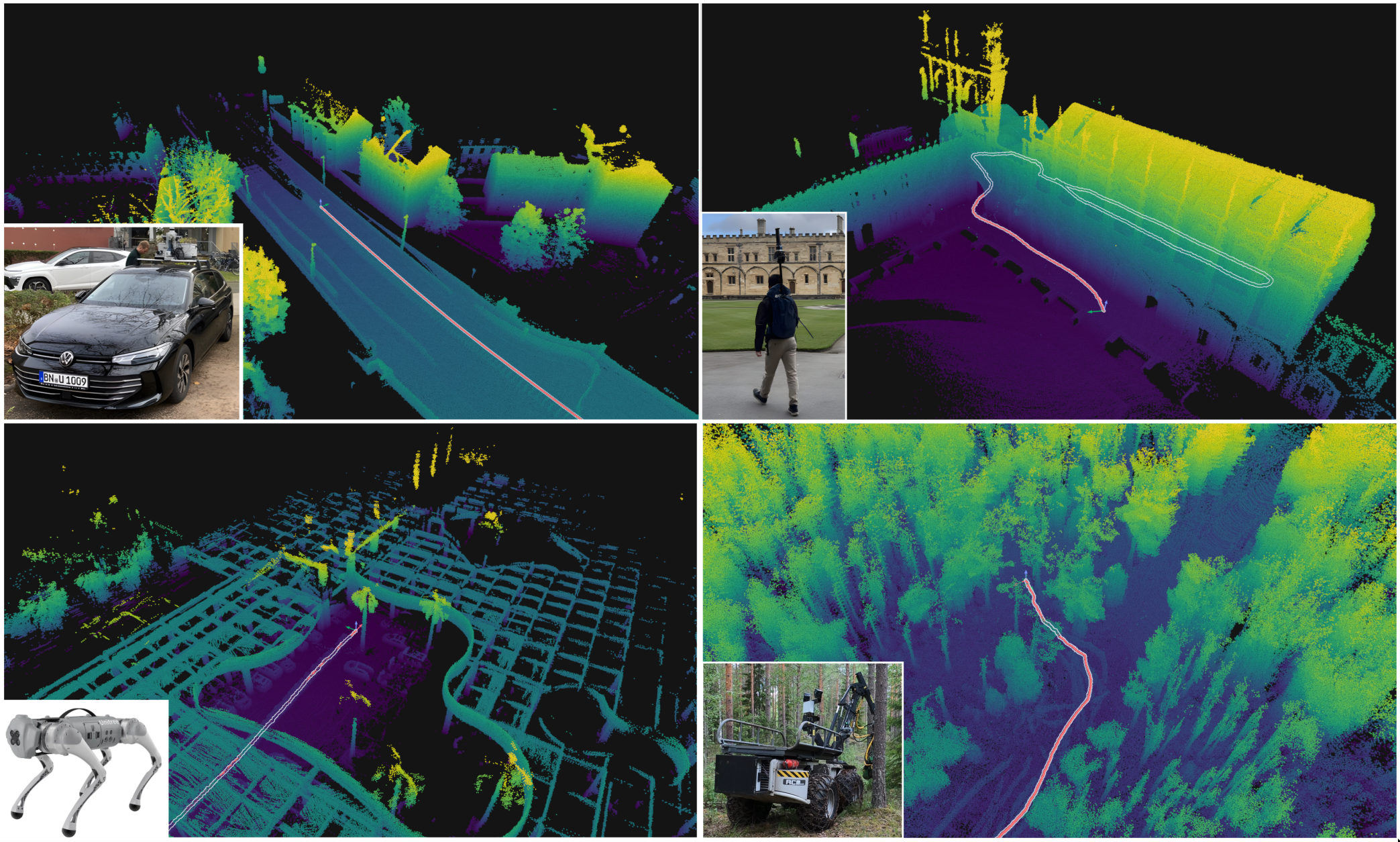
Four different platforms, four different environments, one odometry system
In case you already have a rosbag (ROS1 or ROS2) which contains a TF tree, you can inspect the results of our odometry system with the following two steps
pip install rko_lio rosbags rerun-sdkrko_lio is our odometry package, rosbags is required for using our rosbag dataloader, and rerun-sdk is what we use for our optional visualizer.
Next, run
rko_lio -v /path/to/rosbag_folder # <- has to be a directory! with either *.bag files or metadata.yaml from ROS2and you should be good to go!
Click here for some more details on how the above works and how to use RKO LIO!
The -v flag enables visualization.
You can specify a dataloader to use with -d, but if you don't, we try to guess the format based on the layout of the data.
Our rosbag dataloader works with either ROS1 or ROS2 bags.
Place split ROS1 bags in a single folder and pass the folder as the data path.
Note that we don't support running RKO LIO on partial or incomplete bags, though you can try (and maybe raise an issue if you think we should support this).
ROS2 especially will need a metadata.yaml file.
By default, we assume there is just one IMU topic and one LiDAR topic in the bag, in which case we automatically pick up the topic names and proceed further.
If there are multiple topics per sensor, you will be prompted to select one via the --imu or --lidar flags, which you can pass to rko_lio.
Next, we assume there is a (static) TF tree in the bag.
If so, we take the frame ids from the message topics we just picked up, build a static TF tree, and then query it for the extrinsic from IMU to LiDAR.
Our odometry estimates the robot pose with respect to a base frame, and by default, we assume the LiDAR frame to be the base frame.
If you would like to use a different frame, you can pass the frame id with --base_frame (note the other options available with --help).
The TF tree will be queried for the appropriate transformations (if they exist in the bag!).
In case there is no TF tree in the bag, then you will have to manually specify the extrinsics for IMU to base frame and LiDAR to base frame, as these two are required parameters.
Set one of the extrinsics to identity if you want that one to be the base frame (you will still have to specify both parameters).
You can specify the extrinsics via a config YAML file with the keys extrinsic_imu2base_quat_xyzw_xyz and extrinsic_lidar2base_quat_xyzw_xyz.
You can dump a config with all the options set to default values by running rko_lio --dump_config.
Modify as you require, and pass this file to rko_lio using the -c flag.
Please check python/config in the GitHub repository for example configurations.
An example invocation would then be
# the config should have the sensor extrinsics if the rosbag doesn't
rko_lio -v -c config.yaml --imu imu_topic --lidar lidar_topic /path/to/rosbag_folderFor all possible CLI flags, please check rko_lio --help.
For more install and usage instructions of our python interface, please refer to the python readme, config.md, and data.md.
The python interface to our system can be convenient to investigate recorded data offline as you don't need to setup a ROS environment first.
But please prefer the ROS version over the python version if you can!
The ROS version is the intended way to use our odometry system on a robot. The ROS version also has better performance mainly due to how we read incoming data. Without getting into details, if you can, you should prefer using the ROS version. For offline use, we provide a way to directly inspect and run our odometry on recorded rosbags (see offline mode in ROS usage), which should be preferred over the python dataloader. The python interface is merely meant to be a convenience.
We are working on getting the odometry package into the ROS index, so you can install it using system package managers instead of building from source.
Here's a ROS2 quick start!
Clone the repository into your ROS workspace and then
# we use ninja to build by default
colcon build --packages-select rko_lio # --symlink-install --event-handlers console_direct+To launch the odometry node:
ros2 launch rko_lio odometry.launch.py # config_file:=/path/to/a/config.yaml rviz:=trueNote that we have some default build configuration options which should automatically get picked up by colcon. We have a few dependencies, but as long as these defaults apply, the package should build without any further consideration. If you encounter any issues, please check docs/build.md for further details or open an issue afterwards.
Please refer to the ROS readme for further ROS-specific details.
RKO LIO is a LiDAR-inertial odometry system that is by design simple to deploy on different sensor configurations and robotic platforms with as minimal a change in configuration as necessary.
We have no restriction on which LiDAR you can use, and you can do so without changing any config (we've tested Velodyne, Ouster, Hesai, Livox, Robosense, Aeva sensors). For using an IMU, we require only the accelerometer and gyroscope readings, the bare minimum. You don't need to look up manufacturer spec sheets to provide noise specifications, etc.
All you need to provide is the extrinsic transformation between the IMU and LiDAR and you can start using our system for your LiDAR-inertial odometry needs!
For a brief demo of our odometry on data from different platforms, click below for a (YouTube) video:

It bears mentioning here our convention for specifying sensor extrinsics, the one parameter we do require you to provide.
Throughout this package, we refer to transformations using transform_<from-frame>_to_<to-frame> or transform_<from-frame>2<to-frame>.
By this, we mean a transformation that converts a vector expressed in the <from-frame> coordinate system to the <to-frame> coordinate system.
Mathematically, this translates to:
The superscript on the vector indicates the frame in which the vector is expressed, and transform_<from-frame>_to_<to-frame>.
This project is free software made available under the MIT license. For details, see the LICENSE file.
If you found this work useful, please consider citing our paper:
@article{malladi2025arxiv,
author = {M.V.R. Malladi and T. Guadagnino and L. Lobefaro and C. Stachniss},
title = {A Robust Approach for LiDAR-Inertial Odometry Without Sensor-Specific Modeling},
journal = {arXiv preprint},
year = {2025},
volume = {arXiv:2509.06593},
url = {https://arxiv.org/pdf/2509.06593},
}RKO LIO has been tested on a variety of platforms with different sensor setups:
- Car: Ouster OS1-128; OS2-128, Livox Avia, Aeva Aeries II (HeLiPR dataset)
- Backpack: Hesai XT32, QT32, QT64 (DigiForests dataset); QT128
- Forestry Harvester: Hesai XT32
- Quadruped: Velodyne VLP-16 (Leg-KILO dataset)
- Bicycle: Livox Avia (thanks to @rlabs-oss, YouTube video)
If you've tested RKO LIO on any other platform or sensor configuration, I'd be glad to list it here. Please reach out by email or open an issue!
You can check out the branch ral_submission for the version of the code used for submission to RA-L.
Please note that that branch is meant to be an as-is reproduction of the code used during submission and is not supported.
The master and release versions are vastly improved, supported, and are the recommended way to use this system.
KISS-ICP, Kinematic-ICP, Bonxai, PlotJuggler, Rerun
This package is inspired by and would not be possible without the work of KISS-ICP and Kinematic-ICP. Additionally, we use and rely heavily on, either in the package itself or during development, Bonxai, PlotJuggler, Rerun, and of course ROS itself.
A special mention goes out to Rerun for providing an extremely easy-to-use but highly performative visualization system. Without this, I probably would not have made a python interface at all.