In this project, we apply mobile robotics principles to conduct autonomous reconnaissance in a simulated disaster scenario. Specifically, when introduced into a closed but initially unknown environment, the system accomplishes the following:
- Generate a complete map of the environment
- Locate any victims present in the environment.
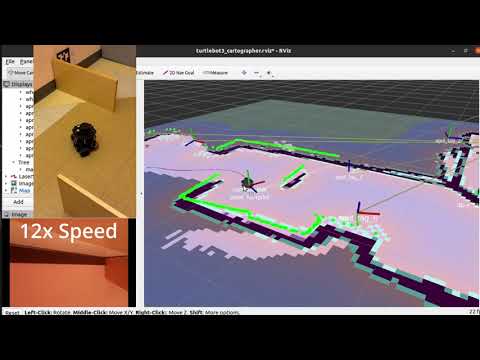
For the purposes of this exercise, the environment is represented using an occupancy grid map, and AprilTags are used as stand-ins for simulated victims. Our objective is to deploy a TurtleBot3 in an unknown environment filled with AprilTags at randoom locations in random poses. The TurtleBot must generate a comprehensive map of the area while also identifying and cataloguing all the AprilTags present, including their unique ID numbers and absolute poses relative to the generated map.
To achieve this, the TurtleBot is outfitted with a 360-degree LiDAR scanner for localization and mapping, as well as a Raspberry Pi Camera V2 for AprilTag detection. A successful reconnaissance mission will necessitate the implementation of various techniques such as mobile robotic kinematics and sensing, feature extraction, simultaneous localization and mapping (SLAM), and motion planning. For SLAM and motion planning, we employ Cartographer_ROS and explore_lite respectively along with multiple custom nodes to make the system more robust. To detect the AprilTags, we have utilized the apriltag_ros package that takes feed from the onboard RasPi camera. This integration of technology and methods will enable the robot to navigate and analyze the environment efficiently, providing valuable data for potential disaster response efforts.
- Open terminal and establish an SSH connection between the robot and the host PC:
ssh ubuntu@IP_ADDRESS_OF_RASPI_ON_ROBOT
- Update the
.bashrcwith the IP addresses of both devices. On the robot, the following two lines should be in the.bashrcexport ROS_MASTER_URI=http://IP_ADDRESS_OF_REMOTE_PC:11311export ROS_HOSTNAME=IP_ADDRESS_OF_RASPI_ON_ROBOT
- While the following two lines should be in the
.bashrcof the host PC:export ROS_MASTER_URI=http://IP_ADDRESS_OF_REMOTE_PC:11311export ROS_HOSTNAME=IP_ADDRESS_OF_REMOTE_PC
- Run turtlebot bringup on the robot.
roslaunch turtlebot3_bringup turtlebot3_robot.launch
-
Run
roscoreon the host PC in another terminal -
Run master.launch file to start the robot.
roslaunch bebop_tag_slam master.launch
- The list of tags' global poses is automatically saved to your working directory under the filename tags_DATETIME.txt