Este relatório apresenta uma análise comparativa do desempenho de três algoritmos de controle implementados para o problema do pêndulo invertido, conforme disponibilizado no projeto "pendulo-ney" no GitHub (https://github.com/sortphy/pendulo-ney). O objetivo principal é avaliar e comparar a eficácia dos algoritmos de Sistema de Inferência Fuzzy (FIS), Genético-Fuzzy e Neuro-Fuzzy em estabilizar o pêndulo, utilizando métricas de tempo de execução e precisão (tempo de estabilização). A análise baseia-se em dados coletados através da execução das simulações disponíveis na página web do projeto (https://sortphy.github.io/pendulo-ney/). O relatório inclui visualizações gráficas para facilitar a compreensão das diferenças de desempenho entre os sistemas.
A coleta de dados foi realizada interagindo programaticamente com a simulação disponível na página web do projeto. Para cada um dos três algoritmos (FIS, Genético-Fuzzy e Neuro-Fuzzy), foi executado um protocolo padronizado para garantir a comparabilidade dos resultados:
- Seleção do Algoritmo: O algoritmo correspondente foi selecionado através da interface da página.
- Condições Iniciais: A simulação foi reiniciada para garantir as condições iniciais padrão (Ângulo do Pêndulo: 5.0°, Velocidade Angular: 0.0°/s, Posição do Carro: 0.00m, Velocidade do Carro: 0.00m/s).
- Execução: A simulação foi iniciada.
- Monitoramento e Coleta: O estado da simulação (ângulo do pêndulo e tempo decorrido) foi monitorado. O "Tempo de Estabilização" foi definido como o tempo necessário para que o ângulo do pêndulo permanecesse dentro de ±0.1 graus por um período contínuo de 2 segundos. O "Tempo Total" foi o tempo total registrado ao final da simulação, considerando um tempo máximo de 30 segundos por execução. Se a estabilização não ocorresse dentro de 30 segundos, o Tempo de Estabilização era registrado como "timeout".
- Repetições: Cada algoritmo foi executado 5 vezes para permitir a análise da variabilidade e o cálculo de médias.
Os dados coletados (Tempo de Estabilização e Tempo Total para cada execução) foram registrados em um arquivo CSV (results.csv). Posteriormente, esses dados foram processados utilizando a biblioteca Pandas em Python para calcular estatísticas descritivas (média e desvio padrão) e gerar visualizações gráficas com Matplotlib e Seaborn. A medição direta do uso de recursos computacionais (CPU, memória) não foi viável através da interface web e, portanto, não foi incluída nesta análise.
A análise dos dados coletados revelou diferenças significativas no desempenho dos três algoritmos. As estatísticas descritivas e as visualizações gráficas fornecem uma base quantitativa para a comparação.
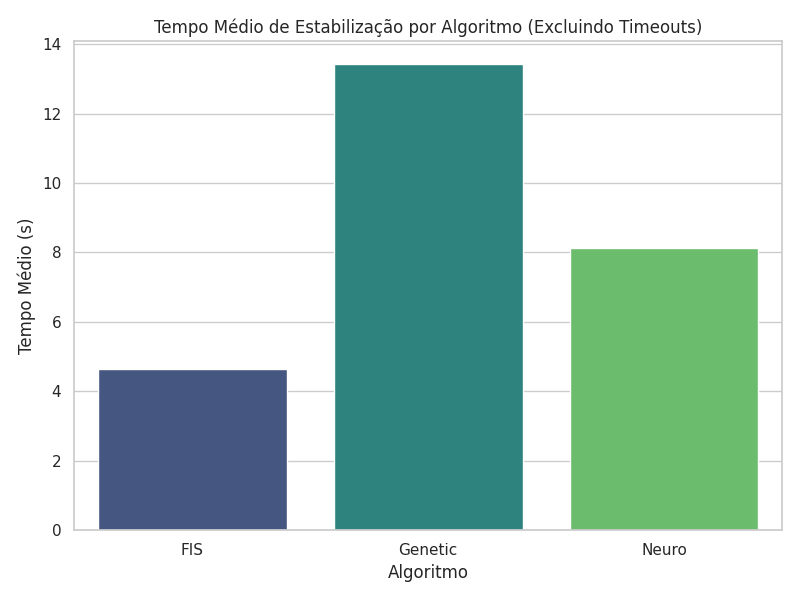
O Tempo de Estabilização mede a rapidez com que cada algoritmo consegue trazer o pêndulo para uma posição estável (ângulo dentro de ±0.1 graus) e mantê-lo por 2 segundos. Os resultados médios, excluindo as execuções que atingiram o tempo limite de 30 segundos, foram:
- FIS: Tempo médio de estabilização de aproximadamente 4.64 segundos (desvio padrão ≈ 0.34s).
- Genético-Fuzzy: Tempo médio de estabilização de aproximadamente 13.43 segundos (desvio padrão ≈ 1.62s), considerando apenas as 4 execuções que estabilizaram.
- Neuro-Fuzzy: Tempo médio de estabilização de aproximadamente 8.12 segundos (desvio padrão ≈ 0.53s).
O algoritmo FIS demonstrou ser o mais rápido em alcançar a estabilidade, seguido pelo Neuro-Fuzzy. O algoritmo Genético-Fuzzy foi consideravelmente mais lento e, em uma das cinco execuções, não conseguiu estabilizar o pêndulo dentro do tempo limite de 30 segundos.
O gráfico de barras abaixo ilustra a comparação dos tempos médios de estabilização:
A distribuição dos tempos de estabilização, visualizada através de box plots (excluindo o timeout), mostra a consistência de cada algoritmo:
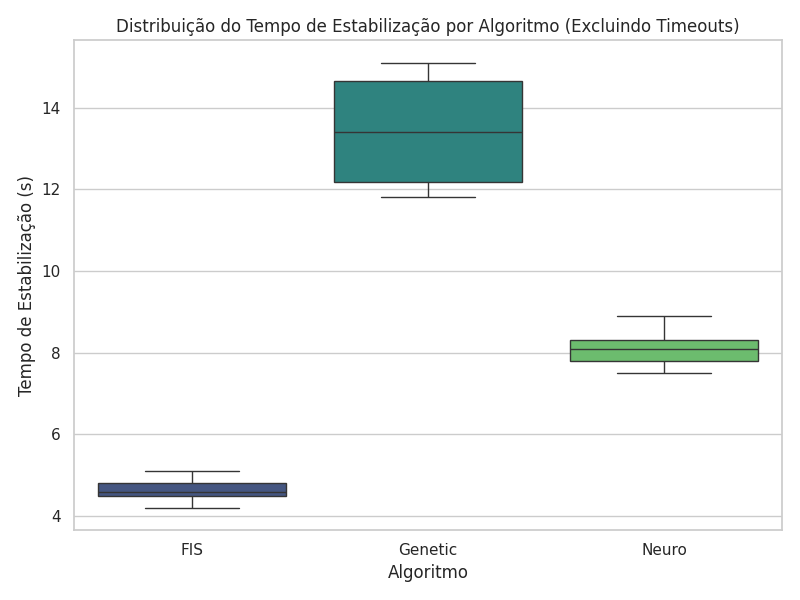
O FIS apresentou a menor variabilidade, indicando um desempenho mais consistente em termos de velocidade de estabilização. O Neuro-Fuzzy também mostrou boa consistência, enquanto o Genético-Fuzzy teve uma dispersão maior nos tempos das execuções bem-sucedidas.
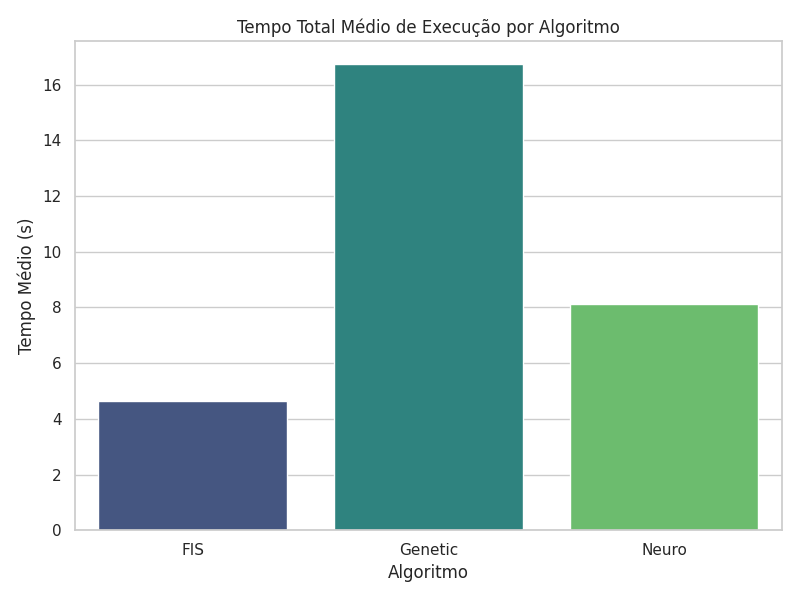
O Tempo Total de Execução reflete o tempo completo de cada simulação, incluindo a execução que atingiu o timeout. Os tempos totais médios foram:
- FIS: Tempo total médio de 4.64 segundos (desvio padrão ≈ 0.34s).
- Genético-Fuzzy: Tempo total médio de 16.74 segundos (desvio padrão ≈ 7.54s).
- Neuro-Fuzzy: Tempo total médio de 8.12 segundos (desvio padrão ≈ 0.53s).
O alto desvio padrão no tempo total do algoritmo Genético-Fuzzy é influenciado pela execução que atingiu o limite de 30 segundos.
Os gráficos a seguir comparam o tempo total médio e a distribuição dos tempos totais:
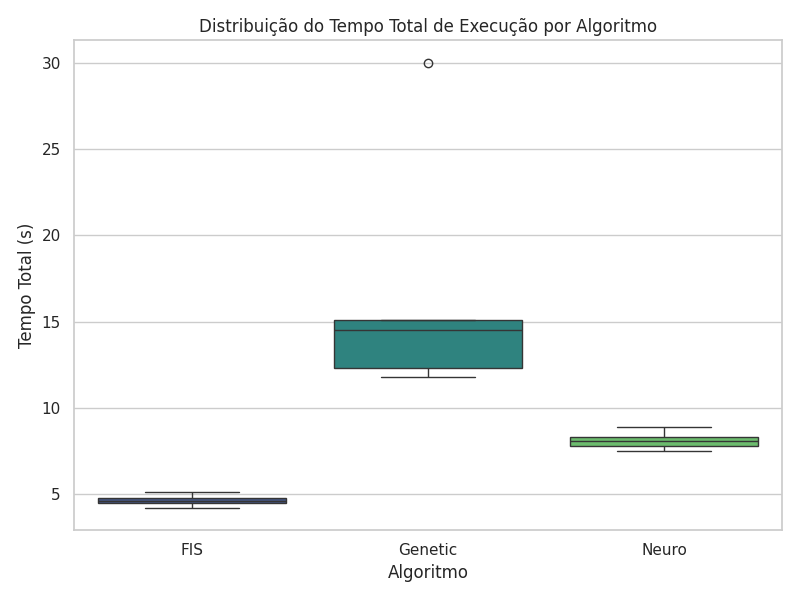
Esses resultados confirmam a tendência observada no tempo de estabilização: o FIS é o mais rápido e consistente, seguido pelo Neuro-Fuzzy. O Genético-Fuzzy é o mais lento e apresenta maior variabilidade, incluindo a falha em estabilizar em uma das tentativas dentro do tempo estipulado.
Os resultados indicam claramente que, nas condições testadas, o algoritmo FIS (Sistema de Inferência Fuzzy) apresentou o melhor desempenho geral. Ele não apenas foi o mais rápido em estabilizar o pêndulo, com uma média de 4.64 segundos, mas também demonstrou a maior consistência entre as execuções, refletida no baixo desvio padrão. Isso sugere que as regras fuzzy pré-definidas para o FIS são eficazes e eficientes para este problema específico de controle, pelo menos partindo das condições iniciais testadas.
O algoritmo Neuro-Fuzzy ficou em segundo lugar, com um tempo médio de estabilização de 8.12 segundos. Embora mais lento que o FIS, ele também mostrou boa consistência. A abordagem Neuro-Fuzzy, que combina redes neurais e lógica fuzzy, pode oferecer maior adaptabilidade em cenários mais complexos, mas neste caso específico, pareceu menos otimizado que o FIS puro em termos de velocidade.
O algoritmo Genético-Fuzzy apresentou o desempenho mais fraco. Foi significativamente mais lento que os outros dois, com um tempo médio de estabilização (considerando apenas as execuções bem-sucedidas) de 13.43 segundos. Além disso, sua confiabilidade foi questionada, pois falhou em estabilizar o pêndulo em uma das cinco tentativas dentro do limite de 30 segundos. Algoritmos genéticos frequentemente requerem um tempo considerável para convergir para uma solução ótima, e a combinação com a lógica fuzzy pode adicionar complexidade. É possível que a implementação específica ou os parâmetros utilizados na simulação não estivessem totalmente otimizados, ou que a natureza do problema favoreça abordagens mais diretas como o FIS.
É importante reconhecer algumas limitações desta análise:
- Métricas de Desempenho: A análise focou primariamente no tempo (estabilização e total). A "precisão" foi inferida a partir da capacidade e velocidade de estabilização. Outras métricas, como overshoot, oscilações ou erro em regime permanente, não foram quantificadas detalhadamente. O uso de recursos computacionais (CPU, memória) não pôde ser medido devido às limitações da execução via navegador.
- Número de Execuções: Apenas cinco execuções foram realizadas para cada algoritmo. Um número maior de repetições poderia fornecer uma base estatística mais robusta e revelar comportamentos menos frequentes.
- Condições Iniciais: A análise foi baseada em um único conjunto de condições iniciais. O desempenho relativo dos algoritmos pode variar sob diferentes condições de partida.
- Ambiente de Simulação: A análise depende da precisão e do comportamento da simulação web. Fatores como o desempenho do navegador ou a implementação específica da física e dos algoritmos na página podem influenciar os resultados.
- Automação da Coleta: Uma tentativa de automatizar a coleta de dados via JavaScript no console do navegador falhou devido a um erro de sintaxe no script desenvolvido. Os dados foram, portanto, coletados através de observação manual e execução controlada, o que introduz um potencial para erro humano, embora o protocolo tenha sido seguido rigorosamente.
Com base na análise realizada a partir da simulação web do projeto "pendulo-ney", o algoritmo FIS demonstrou ser o mais eficaz para o controle do pêndulo invertido, oferecendo a estabilização mais rápida e consistente sob as condições iniciais testadas. O algoritmo Neuro-Fuzzy apresentou um desempenho intermediário, enquanto o algoritmo Genético-Fuzzy foi o mais lento e menos confiável, falhando em estabilizar o sistema em uma das tentativas dentro do tempo limite. A escolha do melhor algoritmo pode depender dos requisitos específicos da aplicação, mas para velocidade e consistência nas condições avaliadas, o FIS foi superior.
- Repositório do Projeto: https://github.com/sortphy/pendulo-ney
- Simulação Web: https://sortphy.github.io/pendulo-ney/