This is the implementation of the paper "Image Matching and Localization Based on Fusion of Handcrafted and Deep Features".
- car_hynet: The code for training and validation.
- core: The core code of DeFusion.
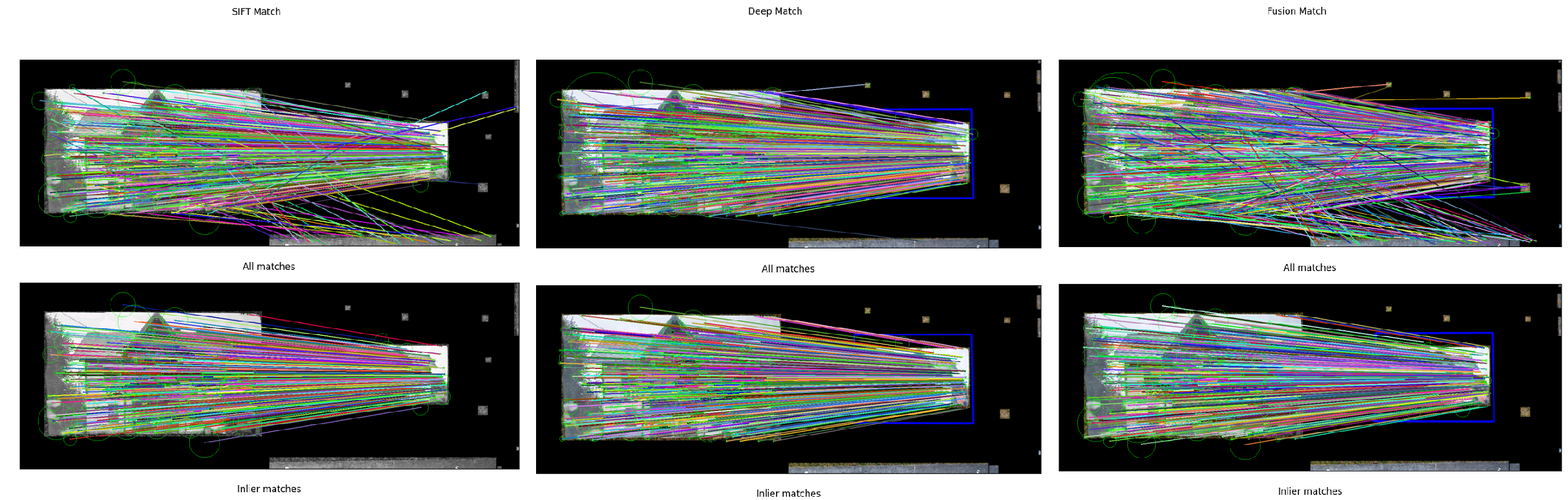
python main.pyThe default output of running the above command is shown below. You can change parameters in main.py and matcher.py and modify the preprocessing steps in image_utils.py to fit your scene.
Overall Architecture

Architecture of CA-SandGlass (CoordAtt SandGlass)

Architecture of CAR_HyNet (Coordinate Attention Residual Network)

We extract handcrafted features using the RootSIFT algorithm on grayscale images. To achieve fine-grained control over the correspondence of feature points during the fusion process and reduce the computational resources of deep learning, we use handcrafted features as the prior knowledge for extracting deep features. We input patches into CAR-HyNet to extract 128-D deep features. This approach fully leverages the feature points extracted by RootSIFT as prior knowledge for CAR-HyNet, resulting in enhanced rotation invariance and eventually generating deep features for fusion.
Architecture of DLF (Decision Level Fusion)

Inverse Perspective Transformation

If you use this repository in your work, please cite our paper:
@ARTICLE{10225672,
author={Song, Xianfeng and Zou, Yi and Shi, Zheng and Yang, Yanfeng},
journal={IEEE Sensors Journal},
title={Image Matching and Localization Based on Fusion of Handcrafted and Deep Features},
year={2023},
volume={},
number={},
pages={1-1},
doi={10.1109/JSEN.2023.3305677}
}