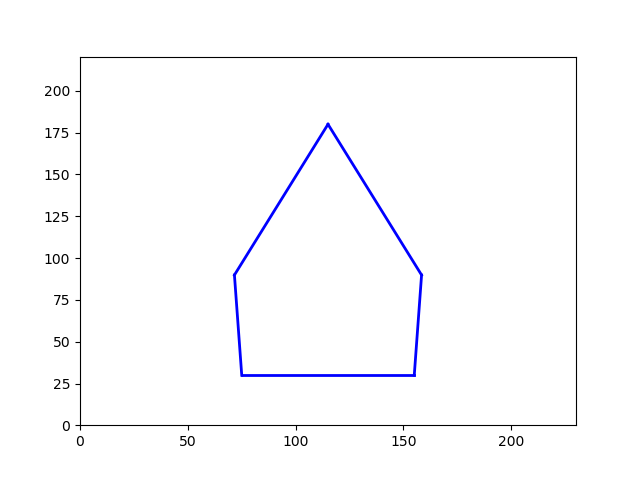
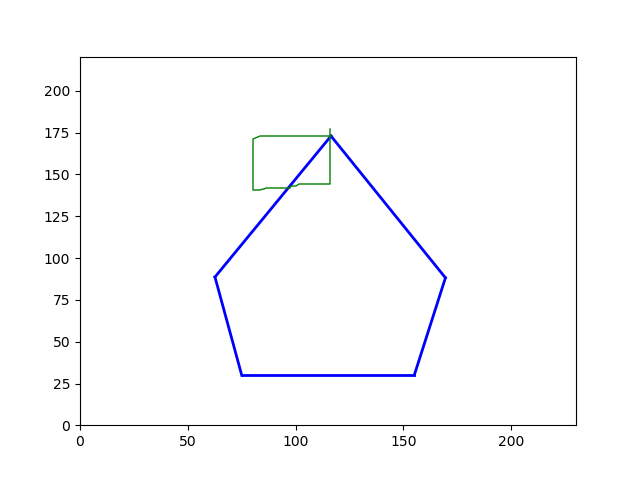
Hi, in this program you can test your five bar manipulator workspace even you don't have physical system. Only you need to do that is;
r1,r2,r3,r4,r5 change these parameters.
// x,y
// \\
r2 // \\ r3
// \\
// \\
// \\
//a2 \\a3
\\ //
r1 \\ r5 // r4
\\a1-----//a4
To run the program, please run below code.
c:\python graph.py
Also, you can freely use kinematics.py module in your project. :)