DIAMANTS is an open-source platform for the simulation and execution of distributed intelligence. Our philosophy: code once, and deploy everywhere—in simulation and in the real world.
This project is a 'playground' for developers, creating a robust bridge between high-level intent (the swarm's strategy) and low-level execution (each drone's physical commands). It's a space to code distributed intelligence, test it in a credible simulation, and push it directly to real-world swarms.
DIAMANTS's objective is to tackle a major technical challenge: achieving emergent collective behaviors in open, modular, and interoperable code. We aim to demonstrate that distributed intelligence is not a theoretical concept, but a robust, documented, and reusable software artifact for the community.
🔥 CRITICAL MISSION: Wildfire Fighting in VAR Region, France 🔥 MISSION CRITIQUE : Lutte contre les incendies dans le VAR, France
This platform is being developed with a vital objective: creating an autonomous drone system to fight wildfires that frequently devastate the VAR region in France. Forest fires represent a major danger to populations, wildlife, and the Mediterranean environment.
Cette plateforme est développée avec un objectif vital : créer un système de drones autonomes pour éteindre les incendies qui ravagent fréquemment la région du VAR en France. Les feux de forêt représentent un danger majeur pour les populations, la faune, et l'environnement méditerranéen.
The project still has critical anomalies that prevent operational deployment. Your expertise can save lives and protect our forests:
Le projet comporte encore des anomalies critiques qui empêchent le déploiement opérationnel. Votre expertise peut sauver des vies et protéger nos forêts :
- 🐛 Bug fixes | Corrections de bugs : Multi-drone system stabilization | Stabilisation du système multi-drones
- 🧪 Field testing | Tests terrain : Algorithm coordination validation | Validation des algorithmes de coordination
- ⚡ Optimizations | Optimisations : Real-time performance improvements | Amélioration des performances temps réel
- 🔧 Integration | Intégration : ROS2/Frontend/Hardware coordination | Coordination ROS2/Frontend/Hardware
- 📚 Documentation | Documentation : Emergency deployment guides | Guides de déploiement d'urgence
🌲 Every contribution can help preserve our forests and save lives. 🌲 Chaque contribution peut aider à préserver nos forêts et sauver des vies.
See DIAMANTS in action! Watch our multi-drone collaborative system working seamlessly from simulation to real-world deployment.
Real-time collaborative SLAM with 8 Crazyflie drones in Gazebo simulation, featuring TMUX orchestration and map fusion.
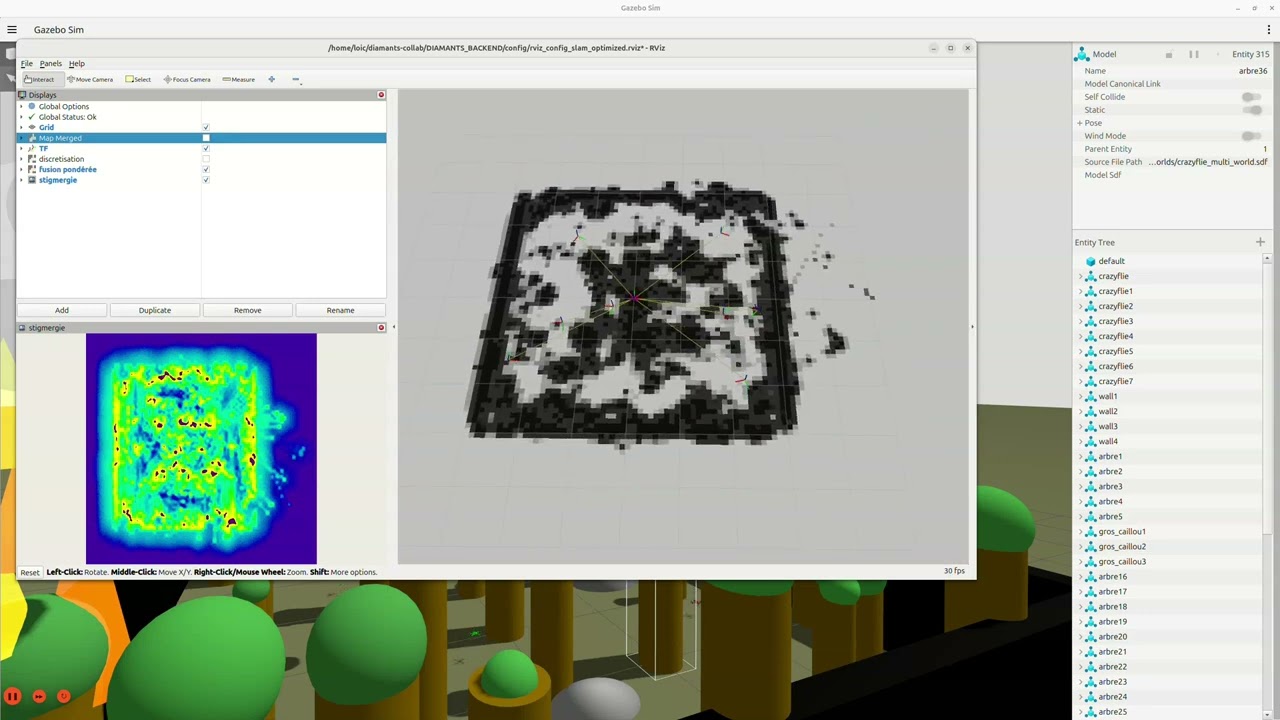
🤖 Backend Features Showcase:
- ✅ 8 Crazyflie drones in Gazebo simulation
- ✅ Real-time collaborative SLAM mapping
- ✅ TMUX orchestration (13 specialized windows)
- ✅ ROS2 Jazzy + Gazebo Garden integration
- ✅ Multi-agent path planning and coordination
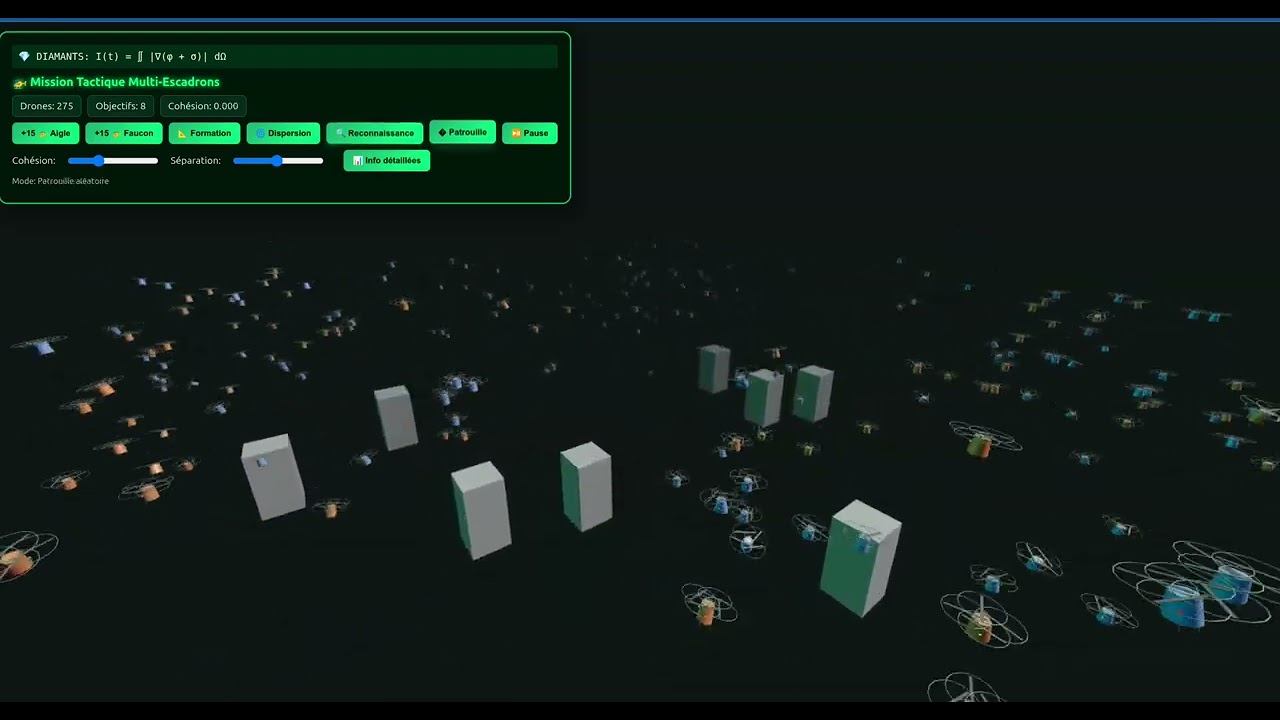
Interactive Three.js + WebGL interface with real-time drone tracking, mission planning, and swarm visualization.

🌐 Frontend Features Showcase:
- ✅ Three.js + WebGL real-time 3D visualization
- ✅ WebSocket communication with ROS2 backend
- ✅ Interactive mission planning interface
- ✅ Vite development server integration
- ✅ Modern responsive UI design
🎮 Advanced Features:
- ✅ Advanced shader effects and lighting
- ✅ Real-time performance monitoring
- ✅ Dynamic camera controls
- ✅ WebSocket integration demonstration
- ✅ Multi-viewport rendering
Extended capabilities showcasing various aspects of the DIAMANTS platform.
🤖 SMA Features:
- ✅ Distributed agent coordination
- ✅ Emergent swarm behaviors
- ✅ Real-time multi-agent communication
- ✅ Collective decision making
🎯 Gradient Navigation Features:
- ✅ Gradient-based path planning
- ✅ Obstacle avoidance algorithms
- ✅ Dynamic field navigation
- ✅ Smooth trajectory optimization
🐝 Swarm Features:
- ✅ Collective swarm intelligence
- ✅ Distributed formation control
- ✅ Emergent group behaviors
- ✅ Scalable multi-drone coordination
🧭 Stigmergy Features:
- ✅ Indirect coordination through environment
- ✅ Pheromone-like trail mechanisms
- ✅ Self-organizing pathfinding
- ✅ Bio-inspired collective intelligence
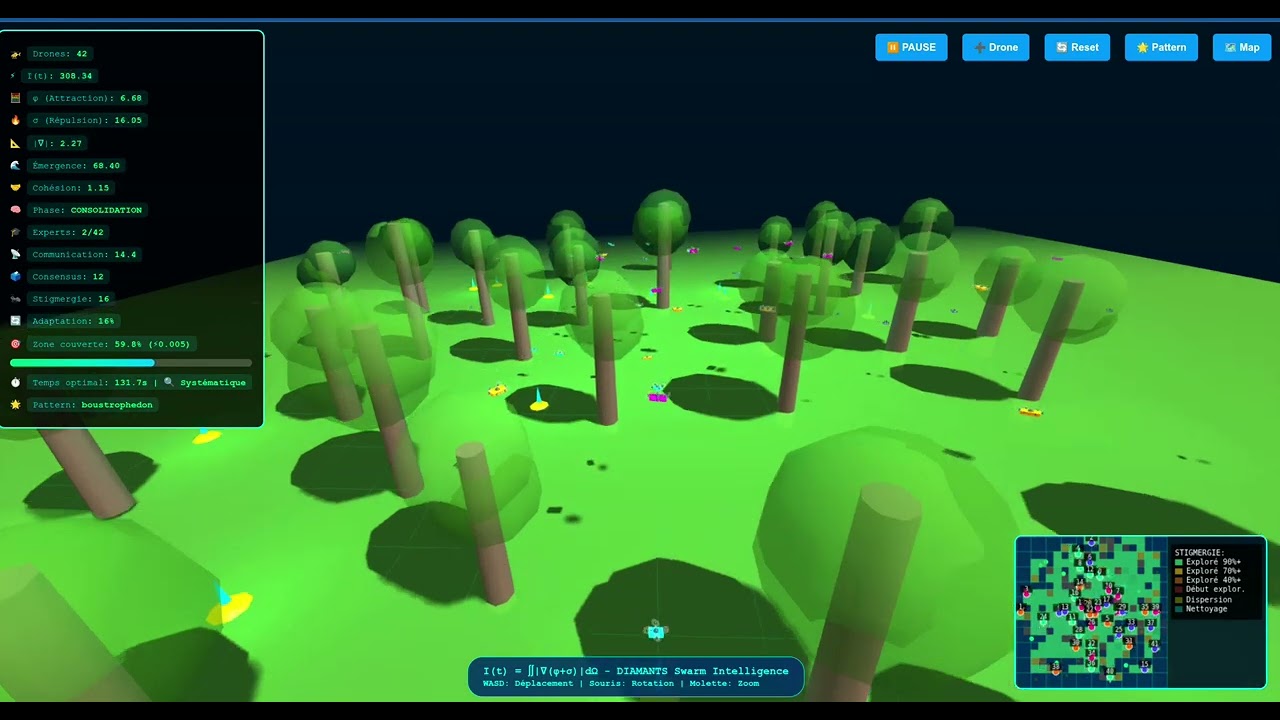
Experience DIAMANTS directly in your browser with our interactive HTML demonstrations showcasing real-time swarm intelligence and mission capabilities.
DIAMANTS_Crazyflie_Search_Rescue_Gazebo_Simulation.html
Complete Crazyflie drone simulation with ROS2-like interface for search and rescue missions:
- ✅ Realistic Crazyflie mesh with physics simulation
- ✅ ROS2-style control panels and topic monitoring
- ✅ Multi-drone collaborative search algorithms
- ✅ Anti-collision system with formation control
- ✅ Tactical minimap with stigmergy visualization
- ✅ Real-time intelligence and mission metrics
DIAMANTS_Complete_Frontend_Swarm_Intelligence_Demo.html
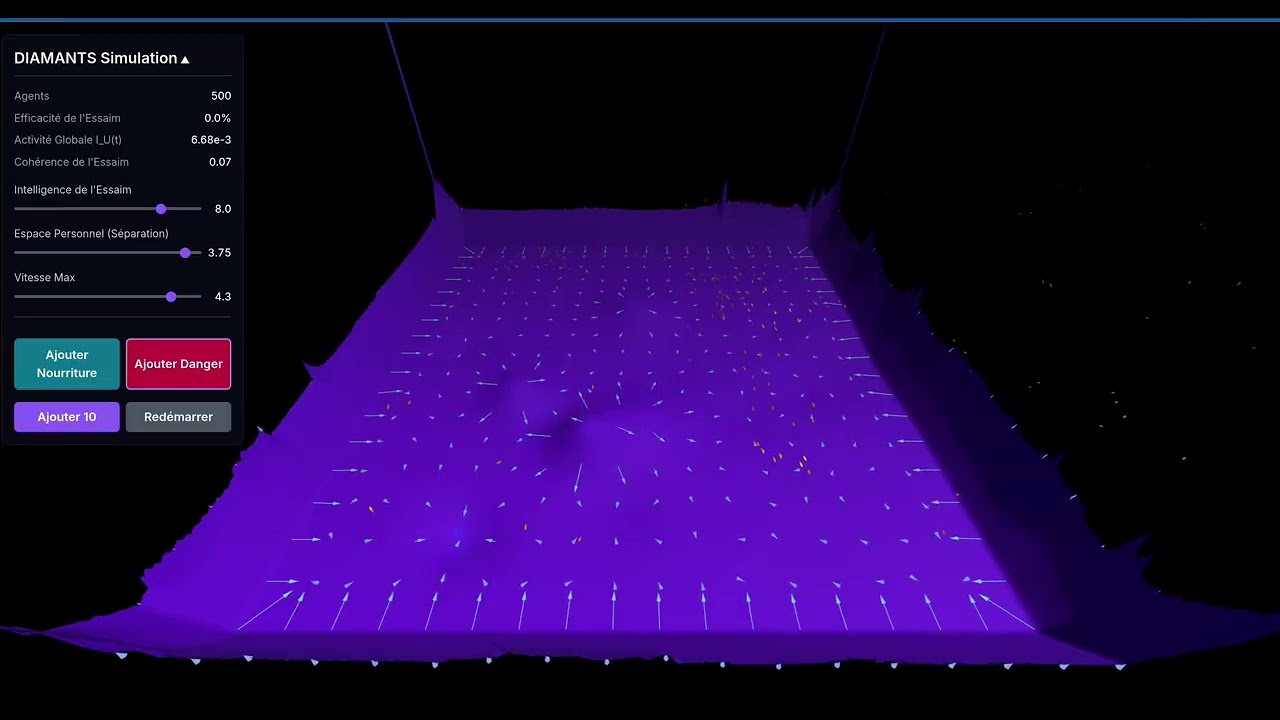
Spectacular visualization of swarm intelligence with advanced effects:
- ✅ Wahoo effect with energy auras between drones
- ✅ Real-time DIAMANTS φ+σ gradient calculations
- ✅ Mathematical formulas displayed live
- ✅ Emergent behavior visualization
- ✅ Immersive futuristic interface design
Video Library - Comprehensive collection of demonstration videos:
- 🤖 Backend ROS2 SLAM System - Multi-drone collaborative mapping
- 🌐 3D WebGL Visualization - Interactive 3D interface
- 🧠 Multi-Agent Systems - Distributed agent coordination
- 🎯 Gradient Navigation - Advanced pathfinding algorithms
- 🐝 Swarm Coordination - Collective intelligence behaviors
- 🧬 Stigmergy Coordination - Bio-inspired coordination
- 🚁 Formation Control - Autonomous formation flying
- 🚨 Emergency Response - Crisis management protocols
- 🧠 Collective Intelligence - Emergent behaviors
- 🛠️ Development Session - Live development process
Our entire ecosystem is built on recognized open standards. No proprietary lock-in.
Main Stack:
- Backend & Simulation: ROS 2, Gazebo, PX4/ArduPilot, MAVROS
- Frontend & Visualization: Vite, Three.js, Babylon.js, WebGL, Node.js
Goal: To foster an ecosystem where every developer can contribute, test, and enrich the platform.
A defined mission must be understood by any agent, regardless of its hardware or middleware.
- Universal Missions: Mission definitions in YAML/JSON
- Unified APIs: Design of agnostic interfaces and mission translators
The scientific core of the project is the study of emergence from simple interactions.
- Explored Algorithms: Stigmergy, consensus algorithms, social forces (Lennard-Jones type)
- Challenge: To code simple behavioral bricks and observe the emergence of a credible collective intelligence
Simulation is a mirror of reality. Zero throwaway code.
- High-Fidelity Simulation: The high-level code produces command streams via ROS 2 that are translated identically for the simulator and for physical agents
- Continuous Validation: Every line of code is validated in simulation and then executed without any modification on the real hardware
📖 For detailed setup instructions, visit our Complete Wiki Documentation
- Ubuntu 24.04 (recommended)
- ROS2 Jazzy (installation guide)
- Python 3.12+
- Node.js 16+
# Clone the collaborative repository
git clone https://github.com/lololem/diamants-collab.git
cd diamants-collab
# One-command launch (interactive menu)
./launch_diamants.sh💡 Need help? Check our Installation Guide or Guide d'Installation (French).
You can run each system autonomously using dedicated scripts:
cd DIAMANTS_API
./setup.sh # First-time setup
./start.sh # Launch API service
./status.sh # Check service status
./stop.sh # Stop servicecd DIAMANTS_BACKEND
./setup.sh # Install ROS2 dependencies
./launch_slam_collaborative.sh # Start collaborative SLAM
# Monitor logs: tail -f logs/diamants_tmux_slam_collab_journal.logcd DIAMANTS_FRONTEND/Mission_system
npm install # Install dependencies
npm run dev # Start development server (http://localhost:3000)
npm run build # Production buildDIAMANTS is actively seeking contributors!
We need help with:
- 🐛 Bug Fixes: System stability and edge cases
- 🚀 Performance Optimization: Multi-agent coordination efficiency
- 📚 Documentation: User guides and API documentation
- 🧪 Testing: Unit tests and integration testing
- 🎨 UI/UX: Frontend interface improvements
- 🤖 Algorithm Development: Advanced swarm intelligence behaviors
- Fork the repository
- Create a feature branch:
git checkout -b feature/amazing-feature - Make your changes and test thoroughly
- Submit a pull request with detailed description
Found a bug or have a feature request? Please create an issue with:
- Detailed description of the problem
- Steps to reproduce
- System environment (Ubuntu version, ROS2 distribution, etc.)
- Expected vs actual behavior
┌─────────────────┐ ┌─────────────────┐ ┌─────────────────┐
│ FRONTEND │ │ DIAMANTS_API │ │ BACKEND │
│ (Three.js) │◄──►│ (FastAPI) │◄──►│ (ROS2) │
│ Mission UI │ │ WebSocket │ │ Gazebo │
│ 3D Visualization│ │ Bridge │ │ Multi-Drones │
└─────────────────┘ └─────────────────┘ └─────────────────┘
- DIAMANTS_BACKEND: ROS2 Jazzy ecosystem with Gazebo Garden/Harmonic for physics simulation
- DIAMANTS_API: FastAPI service providing WebSocket bridge between frontend and ROS2
- DIAMANTS_FRONTEND: Modern Vite + Three.js application for real-time 3D visualization
- ROS2 Jazzy: Robot Operating System for distributed computing
- Gazebo Garden/Harmonic: High-fidelity physics simulation
- Crazyswarm2: Crazyflie drone swarm framework
- SLAM Toolbox: Simultaneous Localization and Mapping
- Python 3.12: Core backend logic
- Vite: Modern build tool and dev server
- Three.js: 3D graphics library for WebGL
- WebSockets: Real-time communication
- ES2020: Modern JavaScript features
- TMUX: Multi-window session orchestration
- FastAPI: High-performance async API framework
- WebSocket Bridge: Real-time ROS2 ↔ Web communication
- Video Library: 11 professionally named demonstration videos (~765MB)
- Interactive Samples: 2 HTML files with complete functionality showcases
- Documentation: Comprehensive guides for all demonstration materials
📖 DIAMANTS Wiki - Comprehensive documentation in English and French
- 🇬🇧 English Documentation: Installation, Architecture, Launch Guide
- 🇫🇷 Documentation Française: Installation et Configuration, Architecture Système, Lancement du Système
- ARCHITECTURE.md - System architecture and design principles
- DIAMANTS_TECH_STACK.md - Complete technical documentation
- CONTRIBUTING.md - Contribution guidelines
- API Documentation - API endpoints and WebSocket protocols
- Video Documentation - Complete video library with detailed descriptions
- Sample Files Guide - Interactive HTML demonstrations guide
DIAMANTS is built on solid scientific foundations in swarm intelligence and distributed systems:
- Emergent Behaviors: Study of collective intelligence from simple agent interactions
- Stigmergy Algorithms: Bio-inspired coordination through environmental modifications
- Consensus Mechanisms: Distributed agreement protocols for multi-agent systems
- Sim-to-Real Transfer: Seamless transition from simulation to physical deployment
- Search and rescue operations
- Environmental monitoring
- Agricultural surveying
- Infrastructure inspection
- Warehouse automation
- Collaborative manufacturing
- Distributed sensing networks
- Autonomous vehicle coordination
- Swarm intelligence algorithms
- Distributed AI systems
- Emergent behavior studies
- Human-swarm interaction
This project is licensed under the MIT License - see the LICENSE file for details.
- ROS2 Community: For the robust robotics middleware
- Gazebo Team: For the high-fidelity simulation environment
- Bitcraze: For the excellent Crazyflie platform and Crazyswarm2
- Three.js Community: For the powerful 3D web graphics library
- Open Source Contributors: For making this collaborative platform possible
- Issues: GitHub Issues
- Email: loic.lemasle@gmail.com
🌟 Star this repository if you find it useful! Contributions are welcome and encouraged.
This project has been developed through full Human-machine teaming collaboration. The entire codebase represents a unique partnership between human creativity and artificial intelligence, demonstrating how collaborative development can accelerate innovation in complex autonomous systems.
This collaborative approach has enabled:
- Rapid prototyping of distributed intelligence algorithms
- Comprehensive testing across multiple simulation environments
- Robust documentation and code architecture
- Innovative problem-solving combining human insight with AI capabilities
- Accelerated development cycles for mission-critical applications
"The best way to predict the future is to invent it, and the best way to invent the future of robotics is to build it collaboratively."