
This package simulates a IBVS(Image based Visual Servoing) - Eye to Hand configuration for 2 link Planar Manipulator.
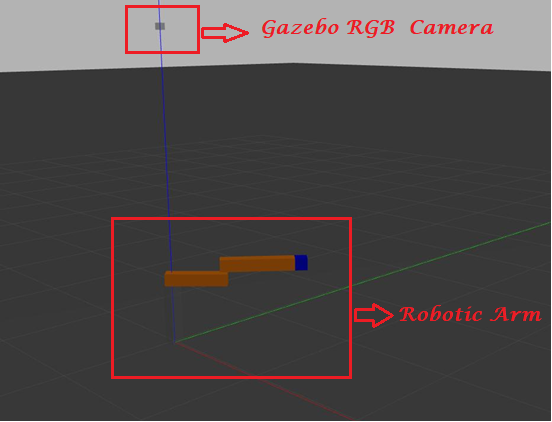
Gazebo Setup:
Feature Detection Node:
Implemented a ROS node to detect End effector Feature point using Color segmentation method in OPENCV.
Proportional IBVS Node:
-> Eye to Hand Configuration
-> Image Jacobian with constant Depth.
-> Robot Jacobian w.r.t Camera Frame
-> Proportional Controller
This repository has been developed and tested in Ubuntu 20.04 and ROS Noetic.
i) Launch the nodes using below command.
roslaunch planar_robot_vs planarbot_vs.launch