Creating ROS Publisher-Subscriber, Service and Action Server-Client Examples
- In this project, I did all the steps that need to be done.
- Just install ROS-noetic version, my_workspace and our own package
- Apply all the remain parts.
- Don't forget to use the catkin_make command in the catkin workspace after making any changes to the files.
- What is ROS and how does it work ?
- How to create and work on ROS workspace ?
- How to create and build our own package ?
- What are nodes ?
- What is topic ?
- What are the msg, srv, action files ?
- Publisher-Subscriber Example with C++
- Service Server-Client Example with C++
- Action Server-Client Example with C++
- Robot Operating System is a flexible framework for writing robot software. It's a collection of tools, libraries and conventions that aim to simplify the task of creating complex and robot behavior across a wide variety of robotic plaforms.
- We need to install ROS - noetic version because i used Ubuntu 20.04
- We are going to use these commands :
$ sudo apt update
$ sudo apt install ros-noetic-desktop-full
- Environment setup :
$ source /opt/ros/noetic/setup.bash
$ sudo apt install python3-rosdep python3-rosinstall python3-rosinstall-generator python3-wstool build-essential
$ sudo apt install python3-rosdep
$ sudo rosdep init
$ rosdep update
- A catkin workspace is a folder where you modify, build, and install catkin packages.
- Our workspace name : my_ws
- Workspace: Set of directories where we store related pieces of ROS code.
- To create a workspace we should apply the following commands :
$ mkdir -p ~/my_ws/src
$ cd ~/my_ws/
$ catkin_make
$ source devel/setup.bash
$ echo $ROS_PACKAGE_PATH
/home/toztekin/catkin_ws/src:/opt/ros/noetic/share
- Packages contain configuration file to start other packages or nodes.
- Packages are organized as follows:
- Launch Folder
- src Folder
- CMakeLists.txt
- package.xml
- All ROS packages need to reside inside a catkin workspace.(my_ws)
- To create a package we should apply the following commands :
$ cd ~/my_ws/src
$ catkin_create_pkg beginner_tutorials std_msgs rospy roscpp
$ cd ~/my_ws
$ catkin_make
$ . ~/my_ws/devel/setup.bash
$ source /opt/ros/noetic/setup.bash
$ catkin_make
$ ls
build
devel
src
- It is the smallest processor unit running in ROS. It is compiled using ROS.
- A separate node must be created for each purpose.
- Nodes can post messages to a topic and subscribe to a topic to receive messages.
[ROS Master]: It acts as a server for node-to-node connections and message communication.
[Roscore]: It acts as a server for node-to-node connections and message communication.
- roscore = ros+core : master (provides name service for ROS) + rosout + parameter server
- rosnode = ros+node : ROS tool to get information about a node.
- rosrun = ros+run : runs a node from a given package.
- They are data paths on which nodes exchange messages.
- More than one publisher on a topic - can subscribe.
[rostopic] : see the status.
[rostopic list] : active topics are listed.
[rostopic list -v] : more detailed list of active topics.
[rostopic echo topicname] : shows the messages on the topic called with topic_name
msg: Simple text files containing messages using within ROS domains
srv: Files that define services. Two-way simultaneous communication. (request - respond)
action: Two-way simultaneous communication. (Goal - Feedback - Result)
IMPORTANT !
Every message, action or srv file we write, we should define them to CMakeLists.txt and package.xml file. Otherwise we will get an ERROR while we were trying catkin_make.
For more information you should check this website
I did all the steps that need to be done. Don't forget to use the catkin_make command in the catkin workspace after making any changes to the files.
Publish: It is the act of transmitting related terms corresponding to the subject.
Publisher Node: It saves its own information and topic to the master. It sends messages to nodes interested in the same topic.
Subscribe: It is the act of receiving messages related to the topic.
Subscriber Node: It saves its own information and topic to the master as publisher. Retrieves the information of the publisher who published the relevant topic from the master.
- We are going to run roscore
- In another terminal window, we should run our talker and listener (publisher and subscriber nodes) to do this:
$ cd ~/my_ws/
$ source ./devel/setup.bash
$ rosrun beginner_tutorials talker (and listener in another terminal)
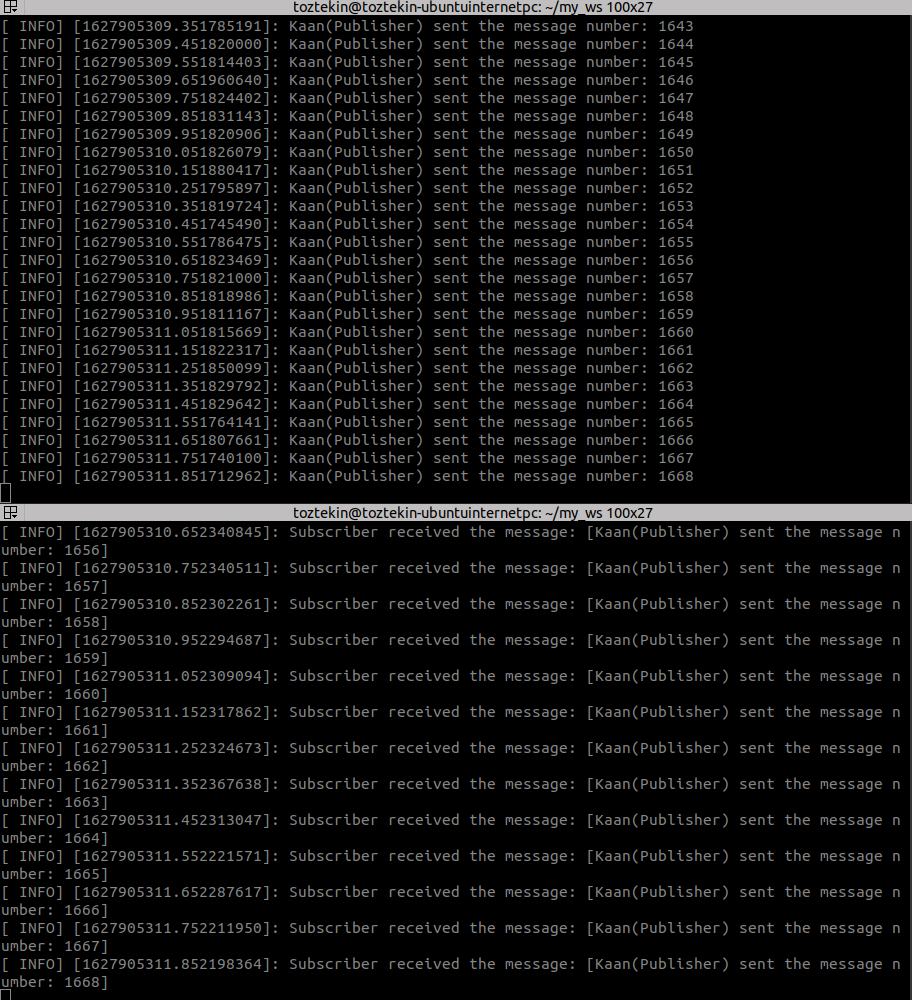
In different terminal windows we run both nodes (talker and listener).

You can have a look at the screenschot of my listener talker nodes. Our talker sends the message and listener takes the message.
- to see the topic is working we are going to use rostopic list and here /chatter is our topic name.
- For more detailed information you can have a look at our script.
$ cd ~/my_ws/
$ rostopic list
$ rostopic echo /chatter
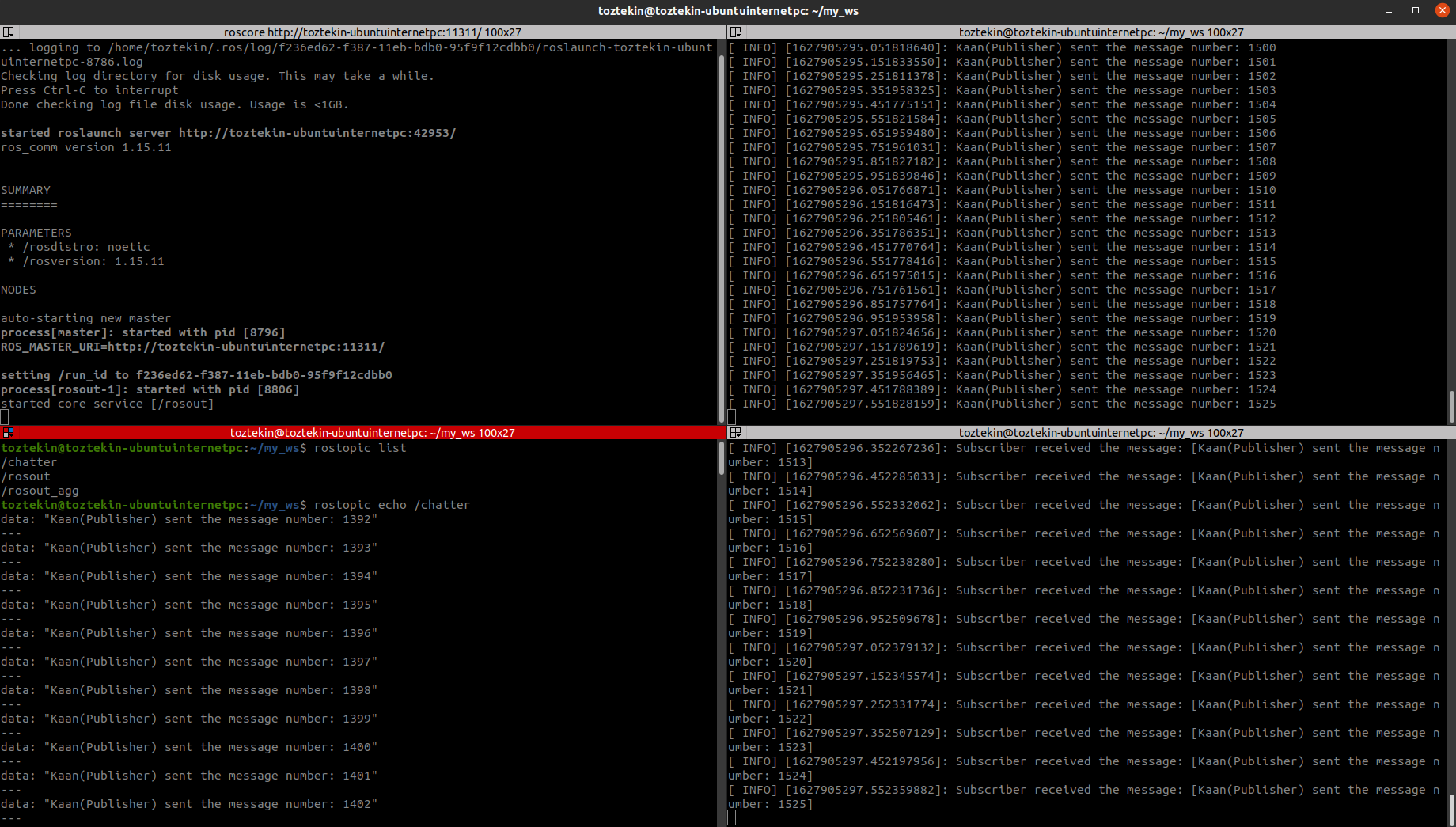
Here we can see our active topics and the message we have used in chatter topic

Final Publisher - Subscriber Project
Screenshot of our finished example. (Contains master - publisher(talker) node - rostopic and message - subscriber(listener) node)
Service: Communication over the service is a two-way simultaneous communication between the service client and the service server.
Services are another way nodes can communicate with each other.
Service Server: In service communication, it takes the service client's request as input and transmits the response as output.
Unlike topics, the service is a one-time message communication.
ROS Service: It is used to command a robot to perform a certain action or to have nodes perform events with a certain condition.
- We are going to run roscore
- In another terminal window, we should run our service server and client to do this:
$ cd ~/my_ws/
$ source ./devel/setup.bash
$ rosrun beginner_tutorials add_two_ints_server (and add_two_ints_client in another terminal)
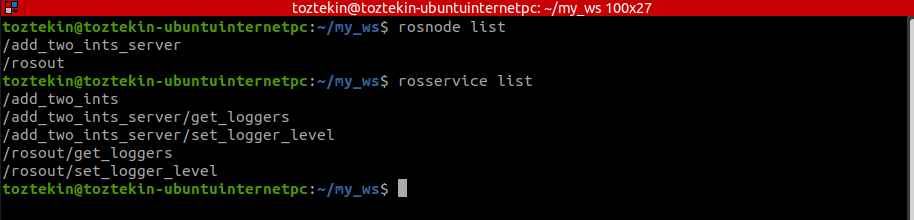
Here, our service is working

Then we called our client to respond our server with correct answer
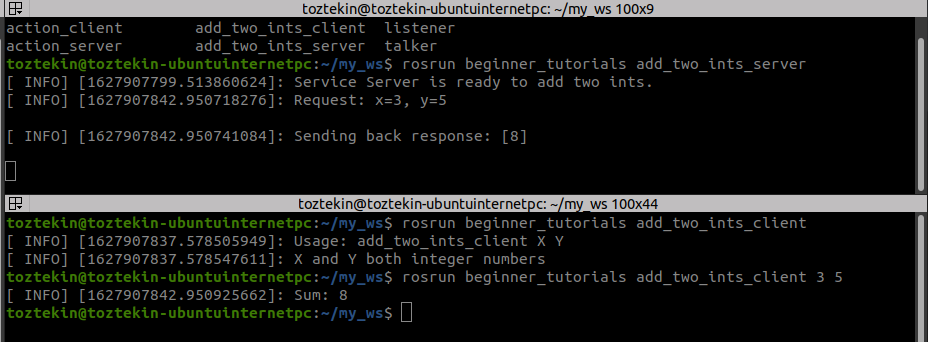
Here we can see our active server and nodes.
Action: Action is another message communication method used for two-way communication.
Action is used when it takes longer to respond after receiving a request and feedback is needed until the result is returned.
It has a structure in the form of goals, feedback and results.
Action Server: Responsible for targeting and responding with feedback or results from the action processor.
Unlike topics, the service is a one-time message communication.
Action Client: It is responsible for forwarding the target to the action server.
- We are going to run roscore
- In another terminal window, we should run our action server and client to do this:
$ cd ~/my_ws/
$ source ./devel/setup.bash
$ rosrun beginner_tutorials action_server (and action_client in another terminal)
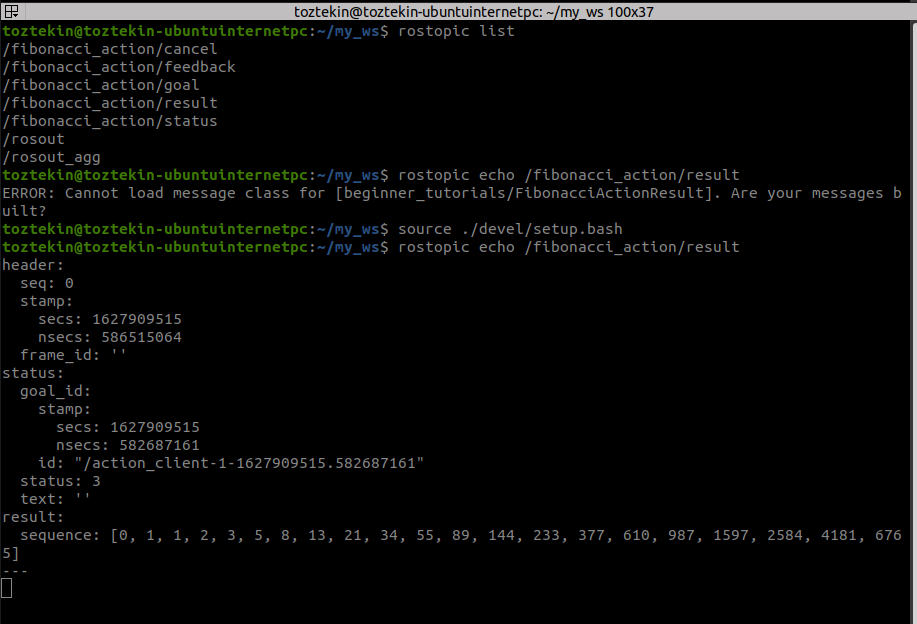
Our server sends the start of the Fibonacci then client get a request to create a respond with answer of first 20 Elements of Fibonacci
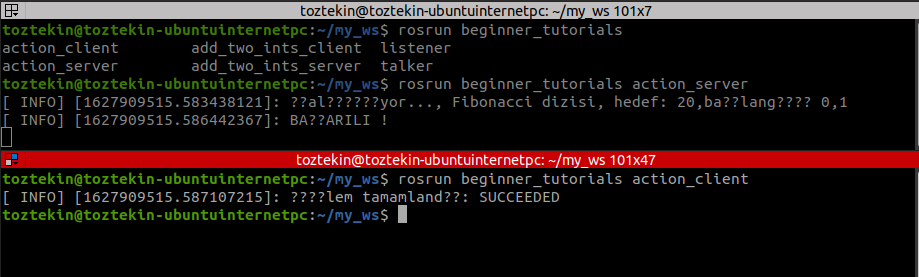
Here we can see the answer as a result of first 20 elements of Fibonacci