Note
A ROS 2 driver node urg3d_node2 (maintained by Hokuyo) with the similar API is available.
Note
After official ROS 1 EOL, this package is released to Alpine ROS.
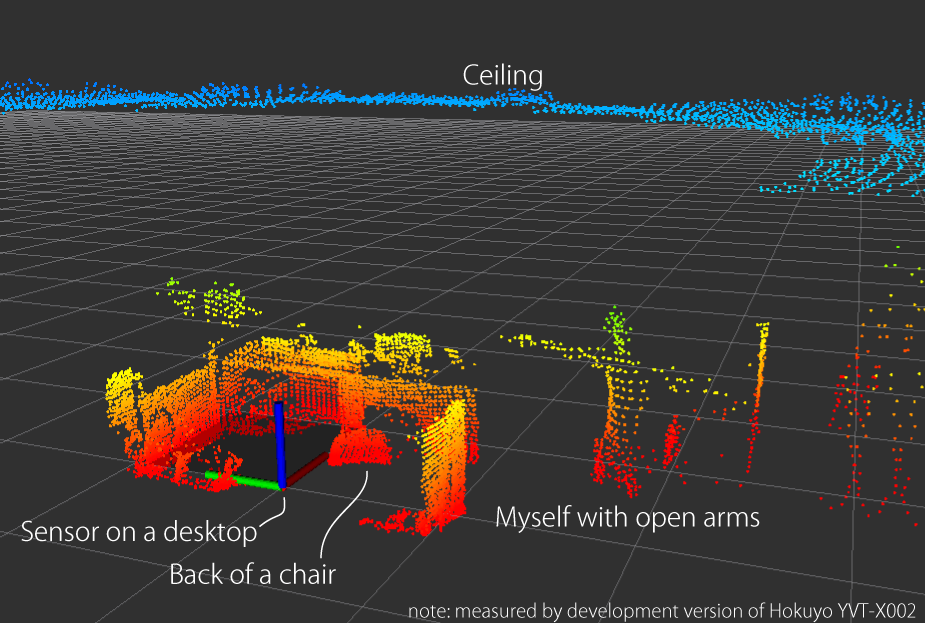
This package provides a ROS driver node for 3D LIDARs with VSSP protocol. VSSP protocol 1.0, 1.1 (for HOKUYO YVT-X002) and 2.1 (for HOKUYO YVT-35LX) are supported.