{kind=link}
Camera calibration is a common problem in Computer vision. We implemented a camera calibration with a checker calibration object by use of corner detection, correspondence matching and a MATLAB toolbox for comparison.
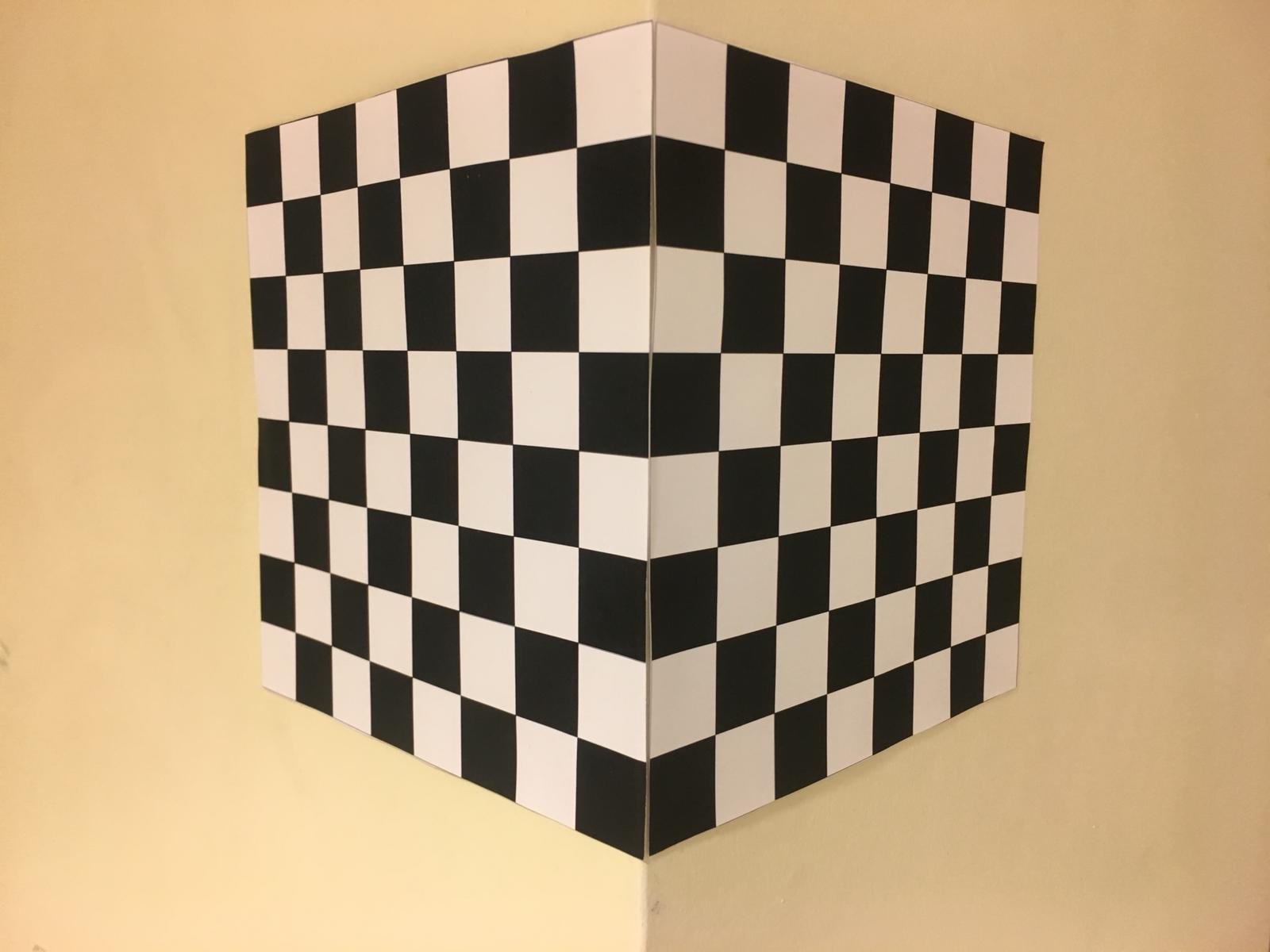
- I used a two checkerboards that is post on the wall as a calibration object.
- I used Harris corner detection method to detect the corners in the image.
- After that, I need to to match some correspondence points in real worlds by creating a coordinate system and in camera pixels.
- This was a hard task because we entered each corners’ pixels and real world coordinates manually.
- We used 91 corners and created the a correspondence matrix (x pixel, ypixel, xrealworld, yrealworld, zrealworld).
- After that I constructed our P matrix (see the PDF file for details)
- Lastly I used SVD to get the m matrix that will be used to find the intrinsic and extrinsic parameters.
I installed a MATLAB toolbox to calibrate our camera for comparison with the procedure above. I took 20 photos of a checkerboard from different angles and load them into the toolbox. Then, we manually plotted the coordinate plane and toolbox automatically detected the corners in the each image. Actually, I applied these steps on all of 20 images. (details are explained in my report)
Toolbox Link: http://www.vision.caltech.edu/bouguetj/calib_doc/
Actually the procedure above is a summary of my work. All the steps are explained detailly in my report:
Camera Calibration Report for all details: https://github.com/alaattinyilmaz/camera-calibration/blob/master/CameraCalibration.pdf