

This is Delto Gripper ROS 2 package.
Some of the new features are enabled by ROS2 and include decreased latency, improved security, and more flexibility regarding middleware configuration.
Check also Delto 3F Gripper
Check also Delto 2F Gripper
| ROS Distro | ROS2 (22.04) |
|---|---|
| Branch | Humble |
The DG3FB (Delto 3F Gripper B type) with firmware version 2.x or higher uses a different communication protocol and is not compatible with this repository.
For DG3FB (firmware 2.x+), please use DELTO_M_ROS2 and refer to the example script dg3fb.py.
The new SDK and ROS2 bridge are supported.
-
delto_3f_description- URDF, mesh file -
delto_3f_driver- Delto Gripper 3F ROS2 driver -
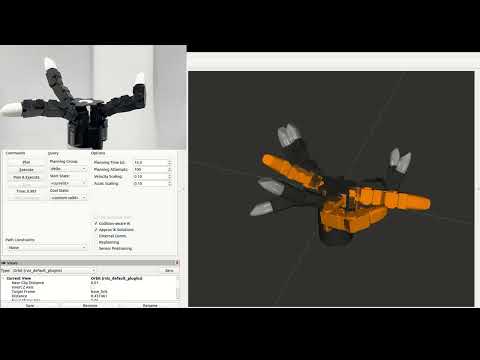
delto_3f_moveit- example MoveIt configuration for Delto Gripper. -
delto_2f_driver- Delto Gripper 2F ROS2 driver
Some physical measurements (like PID Gain, inertia) may not be accurate. Adjustments may be necessary for a perfect simulation or operation.
- ROS2 Install
- Check this ROS 2 Humble installation site.
- Gazebo Ign Install
- Check this Gazebo installation site.
sudo apt-get install ros-humble-ros-gz
- Moveit Install
sudo apt install ros-humble-moveit
- ROS2 Control Install
sudo apt install ros-humble-ros2-control ros-humble-ros2-controllers
- Create a new ROS2 workspace:
cd your_ros2_ws/src
git clone https://github.com/Tesollo-Delto/DELTO_ROS2
colon build Delto_3f_driver subscribes to the topic /gripper_cmd and /target_joint.
- Check this Delto Driver
Connecting Gripper URDF file with robot arm
make new joint (robot_arm_end_link - gripper_base_link)
**example Delto with robot-arm (Universal Robot)
...
</joint>
<joint name="ee_joint" type="fixed">
<origin rpy="0 1.57 0" xyz="0 0 0"/>
<parent link="wrist_3_link"/>
<child link="delto_base_link"/>
<!-- <axis xyz="0.0 1.0 0.0"/> -->
</joint>
...
ros2 launch delto_description dg3f_display.launch.pyros2 launch delto_description dg2f_display.launch.pyros2 launch delto_3f_driver delto_3f_bringup.launch.py delto_ip:=192.168.0.100 delto_port:=502If you have any feature requests, modification suggestions, or encounter any bugs, please create an issue on GitHub or contact the maintainer at support@tesollo.com.