A hybrid control architecture combining behavior-based formation control with LLM-powered decision making for autonomous multi-agent systems.
#Unmanned Aerial Vehicles #Multi-agent Systems #LLM Integration
#Behavior-based Control #Communication-aware #Formation Control
This project builds upon our previous research in formation control and swarm intelligence:
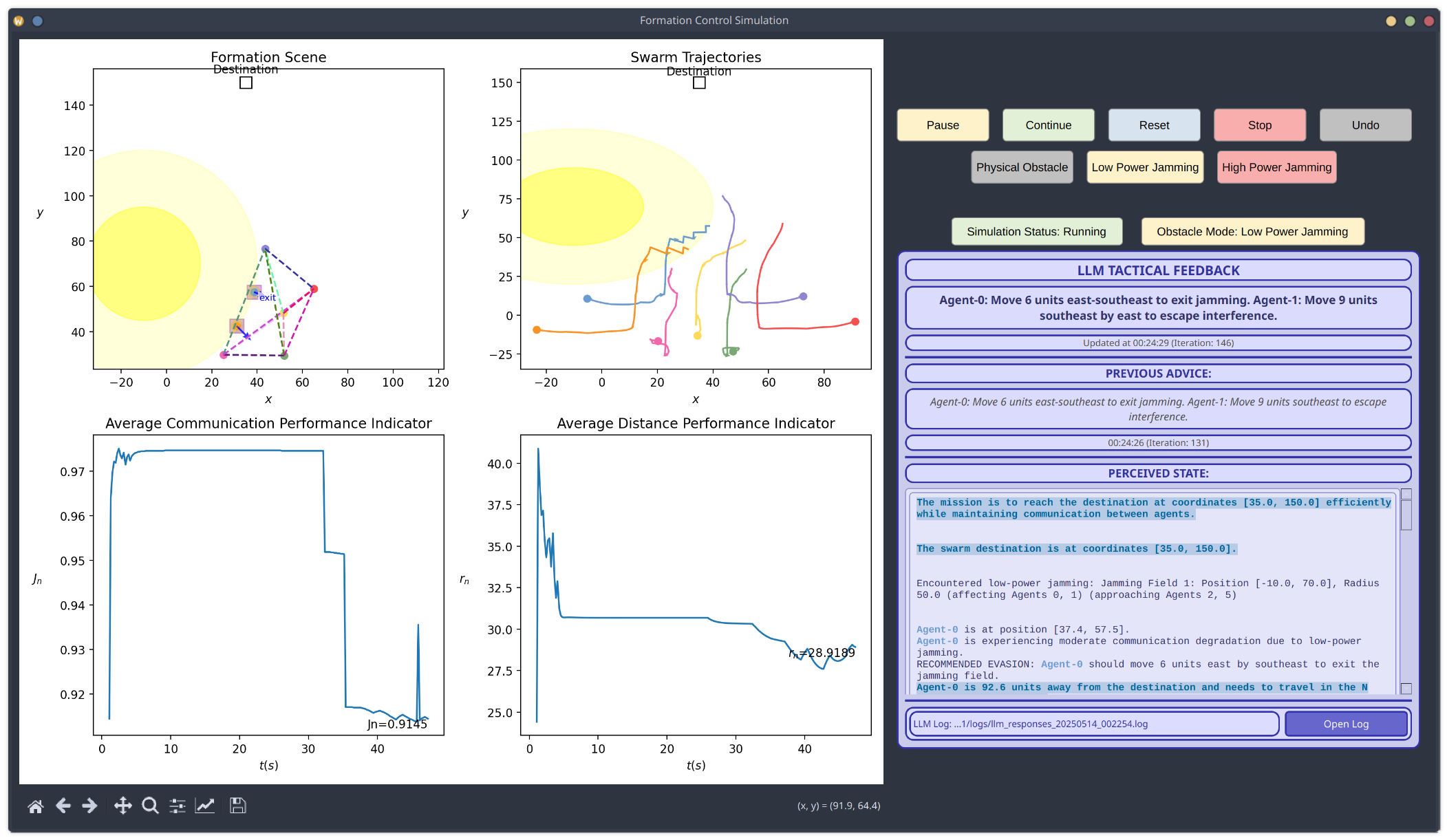
- 🚗 Low-Level Controller: Vehicle agents equipped with behavior-based and communication-aware formation control
- 🤖 High-Level Controller: LLM agents processing simulation data to provide strategic guidance
- 🎯 Goal: Enable swarm resilience and mission completion in challenging environments with jamming/obstacles
It is recommended to use uv to create a virtual environment and install the following package.
uv pip install swarm-squad-ep1To run the application, simply type:
swarm-squad-ep1
# or
swarm-squad-ep1 --help-
Clone the repository and navigate to project folder:
git clone https://github.com/Sang-Buster/Swarm-Squad-Ep1 cd Swarm-Squad-Ep1 -
Install uv first:
# macOS/Linux curl -LsSf https://astral.sh/uv/install.sh | sh
# Windows powershell -c "irm https://astral.sh/uv/install.ps1 | iex"
-
Install the required packages: Option 1 (recommended): Synchronizes environment with dependencies in pyproject.toml and uv.lock
uv sync source .venv/bin/activate # .venv\Scripts\activate for Windows
Option 2 (manual): Manual editable installation without referencing lockfile
uv venv --python 3.10 # Create virtual environment source .venv/bin/activate # .venv\Scripts\activate for Windows uv pip install -e .
-
Install git hooks:
pre-commit install --install-hooks
These hooks perform different checks at various stages:
commit-msg: Ensures commit messages follow the conventional formatpre-commit: Runs Ruff linting and formatting checks before each commitpre-push: Performs final validation before pushing to remote
-
Code Linting & Formatting:
ruff check --fix ruff check --select I --fix ruff format
-
Run the application:
uv run src/swarm_squad_ep1/main.py
📂Swarm-Squad-Ep1
┣ 📂lib // Supplementary materials
┃ ┣ 📂img // Readme Assets
┃ ┣ 📂old // Original old code
┃ ┣ 📄demo.mp4 // Demo Video
┃ ┣ 📄paper.pdf // Paper
┃ ┗ 📄ppt.pdf // Presentation
┣ 📂logs // SimulationLogs
┣ 📂src // Source Code
┃ ┗ 📦swarm_squad_ep1 // Python package
┃ ┃ ┣ 📂controllers // Controllers for swarm behavior
┃ ┃ ┃ ┣ 📄base_controller.py // Base controller interface
┃ ┃ ┃ ┣ 📄behavior_controller.py // Behavior-based controller
┃ ┃ ┃ ┣ 📄controller_factory.py // Controller management system
┃ ┃ ┃ ┣ 📄formation_controller.py // Formation control
┃ ┃ ┃ ┗ 📄llm_controller.py // LLM controller
┃ ┃ ┣ 📂gui // GUI components
┃ ┃ ┃ ┗ 📄formation_control_gui.py // GUI application
┃ ┃ ┣ 📂models // Model components
┃ ┃ ┃ ┗ 📄swarm_state.py // Swarm state management
┃ ┃ ┣ 📂tests // Test cases
┃ ┃ ┃ ┗ 📄test_ollama.py // Test for Ollama
┃ ┃ ┣ 📄config.py // Configuration parameters
┃ ┃ ┣ 📄main.py // Entry point
┃ ┃ ┣ 📄utils.py // Core utility functions
┃ ┃ ┗ 📄visualization.py // Visualization functions
┣ 📄.gitignore
┣ 📄.pre-commit-config.yaml
┣ 📄.python-version
┣ 📄LICENSE
┣ 📄README.md
┣ 📄pyproject.toml
┗ 📄uv.lock