Automated Collision Avoidance Of Unmanned Maritime Vehicles In Single Agent Environment Using Policy Gradient Methods And Deep Reinforcement Learning.
-
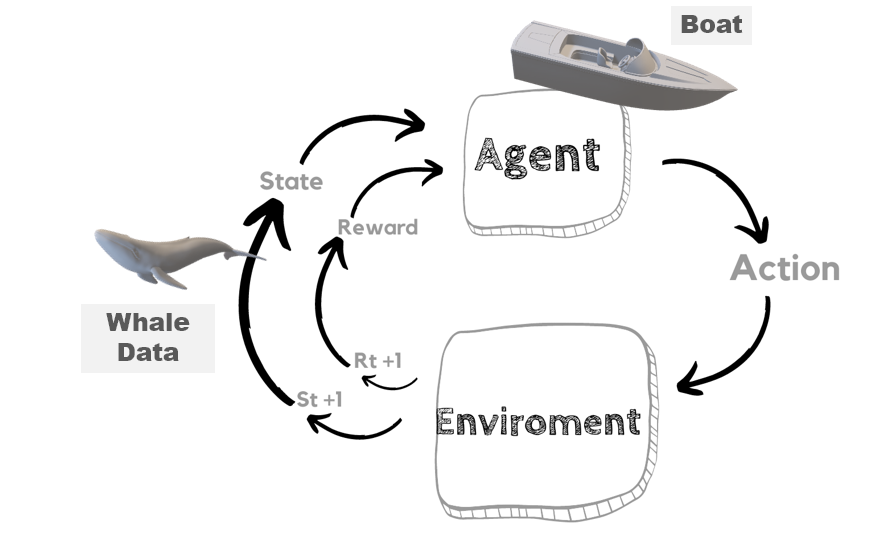
Deep reinforcement learning based collision avoidance method for a single agent environment.
-
Deep Reinforcement Learning (DRL) algorithms like:
-
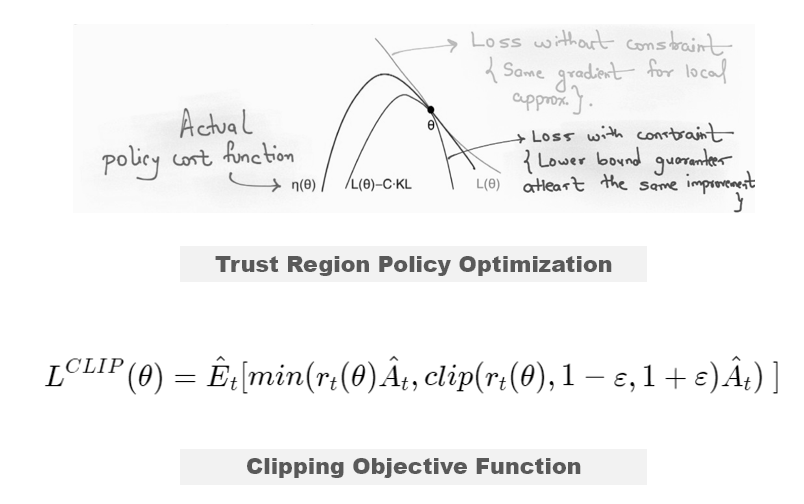
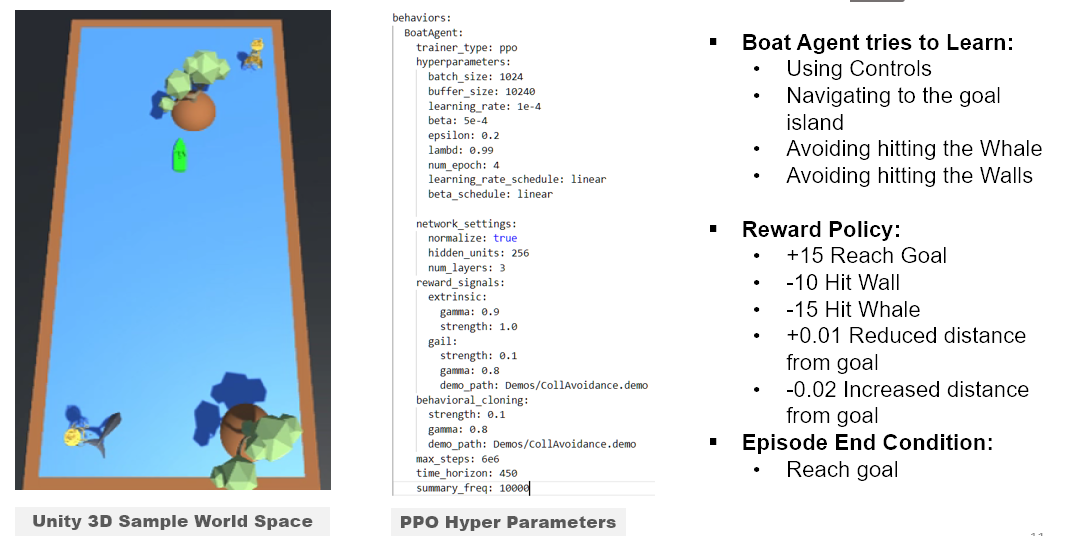
Proximal Policy Optimization (PPO)
-
Soft Actor Critic (SAC)
-
Deep Q Networks (DQNs)
-
Develop our own DRL algorithm after learning existing available algorithms.
-
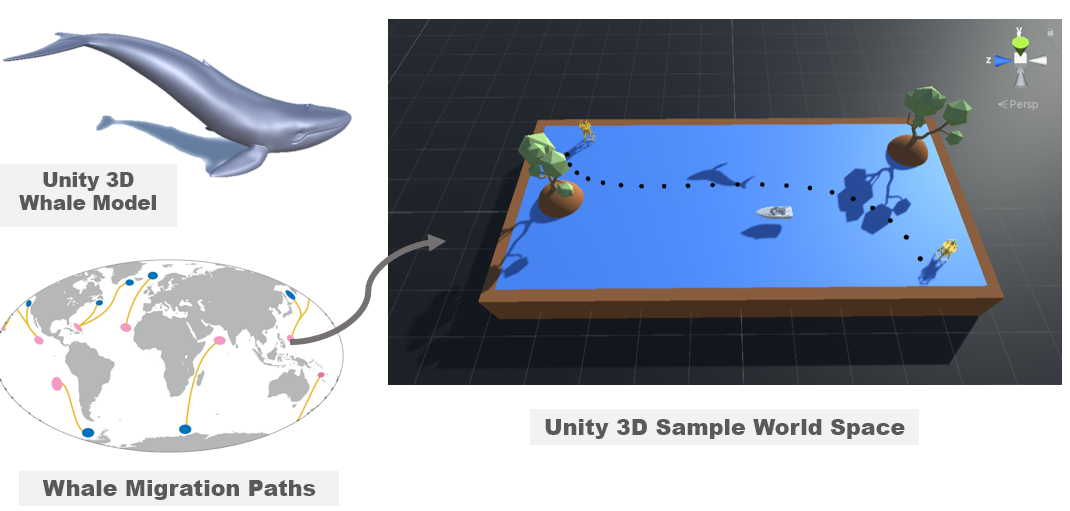
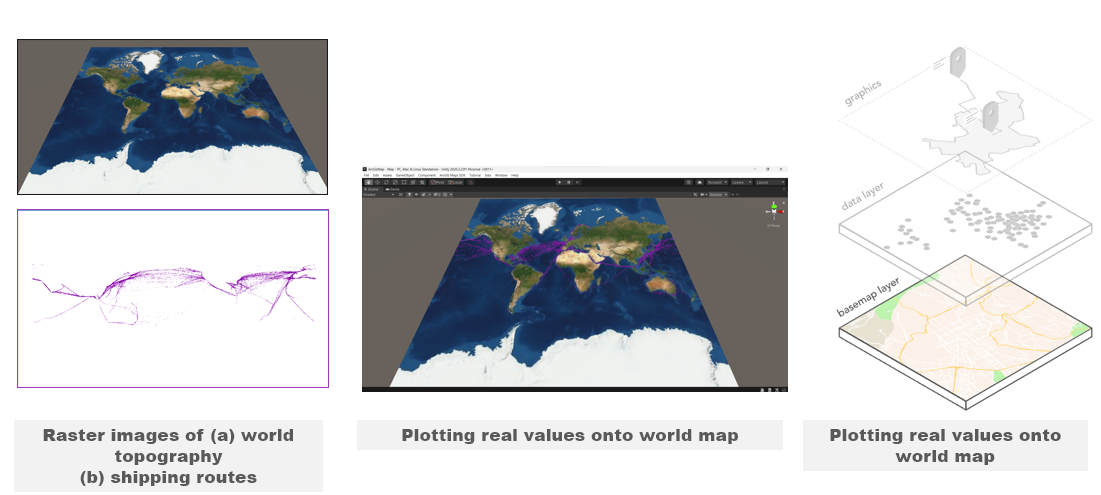
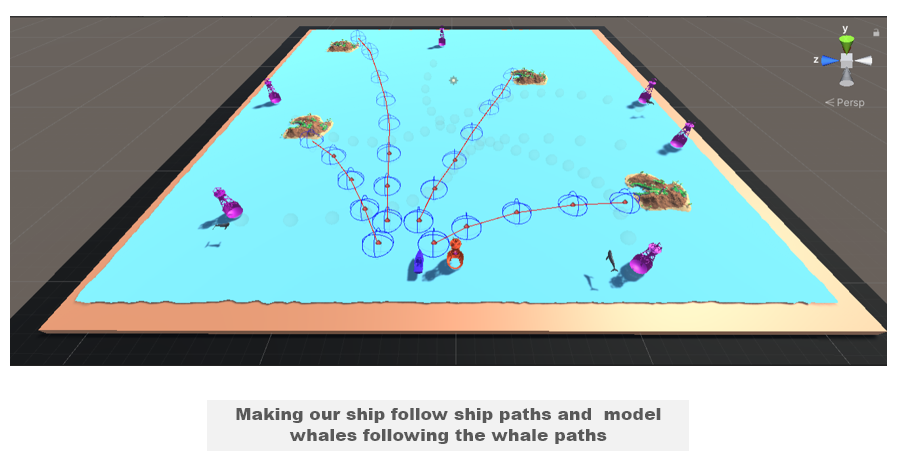
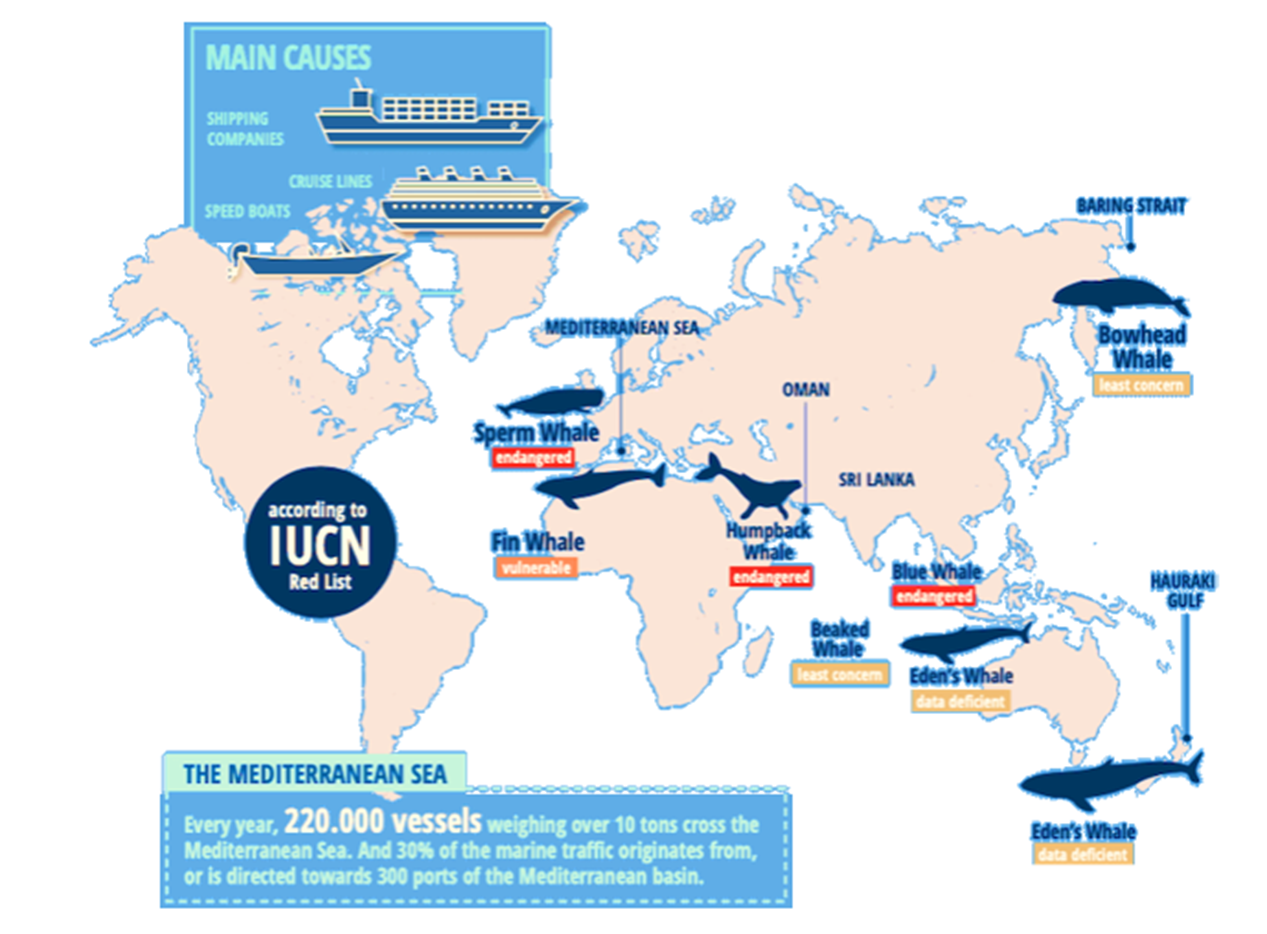
Simulated Environment with whales and a ship using Unity Engine.