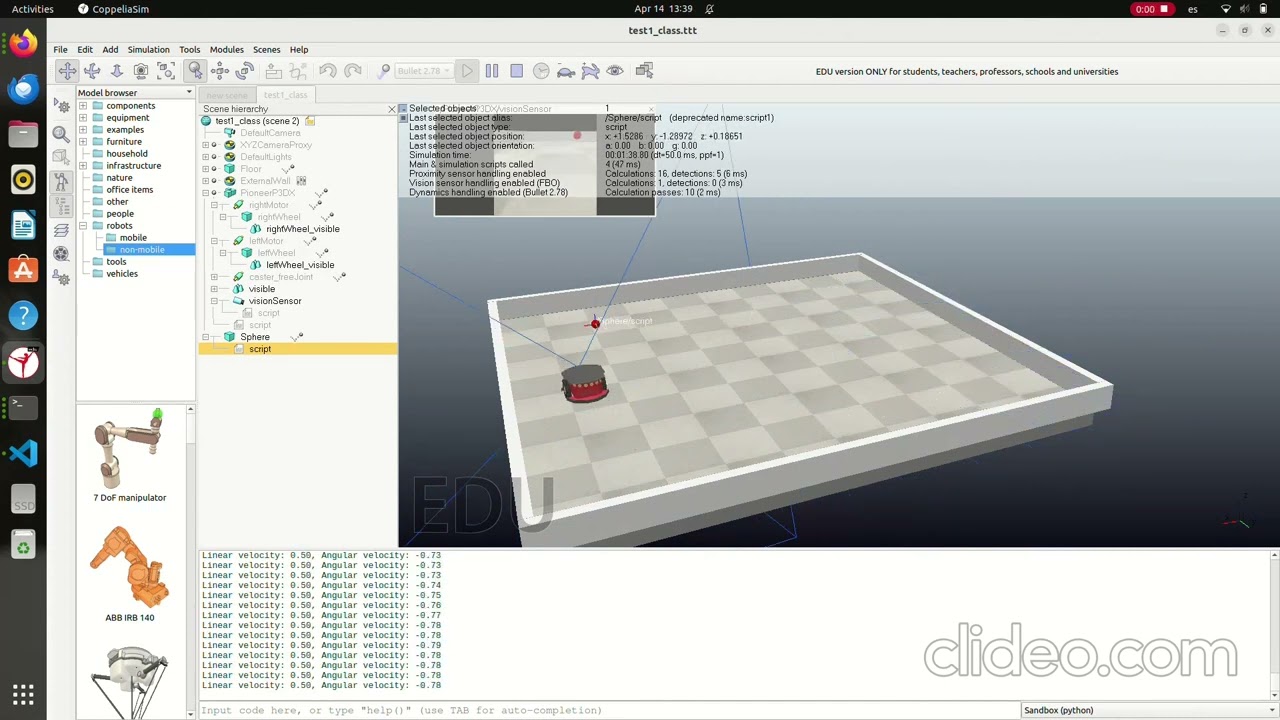
Este repositorio contiene un sistema de control visual para un robot diferencial simulado en CoppeliaSim, implementado en ROS 2. El comportamiento del robot está gobernado por visión por computadora a través de dos nodos:
color_fsm: Máquina de estados finita basada en colores (verde, naranja, azul, amarillo)vision_controller_node: Seguimiento proporcional de una esfera roja
El robot se controla mediante el tópico /cmd_vel, el cual es interpretado por un script embebido en CoppeliaSim que aplica velocidades a las ruedas.
Este nodo implementa una máquina de estados basada en el color detectado en la imagen. Cambia su comportamiento según el color:
- 🟢 Verde: Avanza o ajusta dirección si está desalineado
- 🟠 Naranja: Gira a la derecha
- 🔵 Azul: Gira a la izquierda
- 🟡 Amarillo: Se detiene por 5 segundos
- ⚫ Sin color: Detiene el robot
Detalles:
- Subscrito a:
/image(sensor_msgs/Image) - Publica a:
/cmd_vel(geometry_msgs/Twist) - Tecnologías:
cv_bridge, OpenCV, detección HSV
ros2 run coppeliasim_diffdrive color_fsmEste nodo realiza seguimiento visual a una esfera roja mediante control proporcional, ajustando velocidad lineal y angular según el área y posición del objeto.
- Controla error horizontal con filtro EMA
- Controla distancia con proporcional al área del contorno
- Si pierde el objeto, gira en la última dirección conocida
Detalles:
- Subscrito a:
/image - Publica a:
/cmd_vel - Parámetros:
k_p,k_dist,v_max,alpha,target_area
ros2 run coppeliasim_diffdrive vision_controller_nodeEste script Lua ejecutado dentro de CoppeliaSim escucha /cmd_vel y aplica directamente las velocidades calculadas a las ruedas del robot simulado.
- Recibe mensajes
Twistdesde ROS 2. - Convierte velocidades lineales y angulares a velocidades de rueda.
- Usa
sim.setJointTargetVelocitypara mover los motores.
import rclpy
from rclpy.node import Node
from geometry_msgs.msg import Twist
class Subscriber(Node):
def __init__(self, cmd_vel):
super().__init__('subscriber_cmd_vel')
self.subscription = self.create_subscription(Twist, cmd_vel, self.callback, 10)
self.leftMotor = sim.getObject('./leftMotor')
self.rightMotor = sim.getObject('./rightMotor')
def callback(self, msg):
linear_vel = msg.linear.x
angular_vel = msg.angular.z
leftVel, rightVel = self.obtainVelocities(linear_vel, angular_vel)
sim.setJointTargetVelocity(self.leftMotor, leftVel)
sim.setJointTargetVelocity(self.rightMotor, rightVel)
def obtainVelocities(self, linear, angular):
wheel_radius = 0.097
wheel_base = 0.1155
v_left = linear - (angular * wheel_base / 2.0)
v_right = linear + (angular * wheel_base / 2.0)
return v_left / wheel_radius, v_right / wheel_radius
def sysCall_init():
sim = require('sim')
simROS2 = require('simROS2')
rclpy.init()
self.subscriber_node = Subscriber('cmd_vel')
def sysCall_sensing():
rclpy.spin_once(self.subscriber_node, timeout_sec=0)
def sysCall_cleanup():
self.subscriber_node.destroy_node()
rclpy.shutdown()flowchart TD
subgraph ROS_2
A1[ColorFSM Node]
A2[VisionController Node]
end
subgraph CoppeliaSim
B1[Camera Publisher - image]
C[Motor Control Script - Subscriber]
D[Left and Right Motors]
end
A1 -->|/cmd_vel| C
A2 -->|/cmd_vel| C
B1 --> A1
B1 --> A2
C --> D
- ROS 2 (Humble o superior)
- CoppeliaSim (con
simROS2plugin activo) cv_bridge,OpenCV,sensor_msgs,geometry_msgs
MIT License
Pull requests y sugerencias son bienvenidas. Para cambios importantes, abre primero una issue para discutir lo que deseas proponer.