WAREOPS is a line-following, pick-and-place warehouse management robot developed as part of an engineering project at VIT-AP University.
It automates item transport and placement within a warehouse using sensors, a forklift mechanism, and wireless communication between microcontrollers.
To optimize warehouse operations by automating the movement, scanning, and placement of packages using a robot equipped with:
- Infrared sensors for line navigation
- Ultrasonic sensors for obstacle and height detection
- QR code-based routing at intersections
- Wi-Fi modules for device-to-device communication
- ESP32-CAM for QR scanning and object size classification
-
Line Following Navigation
IR sensors track a predefined path across warehouse grid lines. -
Pick and Place Mechanism
A motorized forklift lifts and places packages at specific rack heights. -
Obstacle Detection
Dual ultrasonic sensors detect objects in front and measure lift height. -
QR Code-Based Routing
At intersections, an ESP32-CAM scans QR codes to decide the next route. -
Camera-Based Object Size Detection
ESP32-CAM detects and classifies objects as Small (S), Medium (M), or Large (L). -
Wireless Communication
Arduino and ESP32-CAM communicate over Serial and Wi-Fi for control and data transfer.
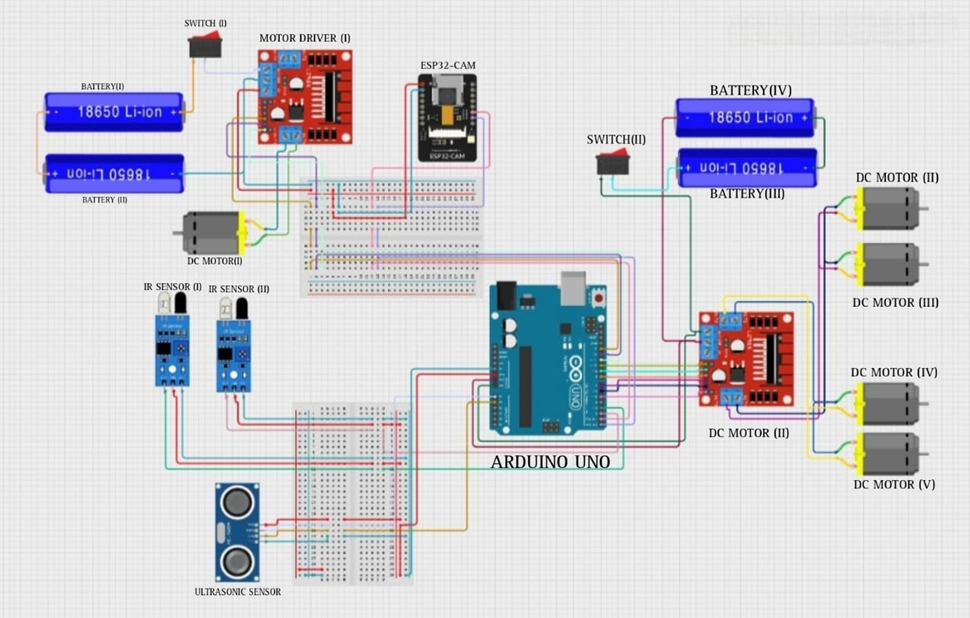
- Arduino Uno – Main navigation & lift control
- ESP32-CAM (AI Thinker) – QR scanning & object classification
- ESP8266 – Rack communication module
- L298 Motor Driver – Drive motors
- Lift Motor Driver – Forklift control
- DC Motors – Robot movement
- IR Sensors – Line following
- Ultrasonic Sensors – Obstacle detection & lift height sensing
- Jumper Wires, Breadboards, Battery Pack
- Arduino IDE – Programming Arduino & ESP32-CAM
- C/C++ (Arduino) – Microcontroller logic
- HTML + JavaScript – ESP32-CAM web interface
- quirc – QR code detection library for ESP32-CAM
- Jinu Joji
- Aadith M Mathew
- Anaswara Jaykumar
- Mekha Manosh
- Aayushi Maji
This project is licensed under the MIT License – see the LICENSE file for details.