Task 1 Camera Frames #42
-
|
Hi, In task 1, can I assume that the offset between the left camera and the right camera is a known constant? By looking into the yaml file/subscribing to the topics, I see the transformation is only a 0.04 translation offset in the horizontal direction. In other words, is the optical center of the cameraR always at (0, 0.04, 0) in cameraL's frame? Thank you so much! Yiwei |
Beta Was this translation helpful? Give feedback.
Replies: 3 comments 3 replies
-
|
Hello Yiwei, |
Beta Was this translation helpful? Give feedback.
-
|
Thank you for the confirmation! |
Beta Was this translation helpful? Give feedback.
-
|
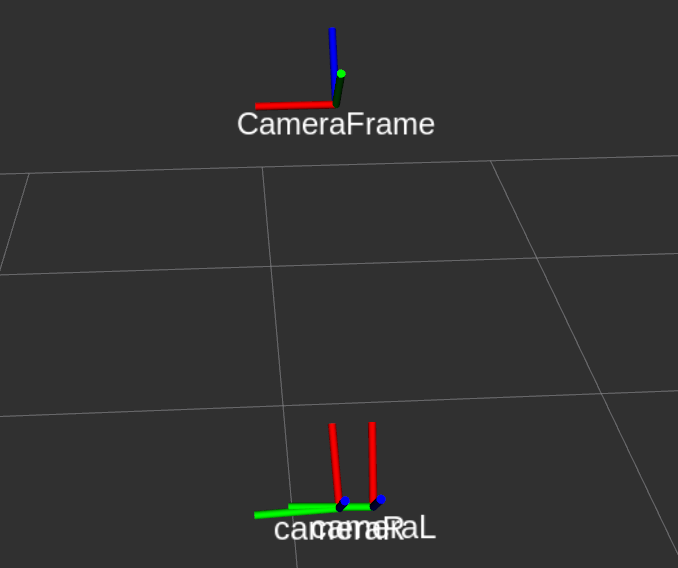
Hi guys, Are the stereo camera's optical axes supposed to be parallel? They are not currently. Cameras are translated wrt. each other, but they "look at" the same point, i.e., cameraL:
location: {x: -0.02, y: 0.0, z: -0.5}
look at: {x: 0.0, y: 0.0, z: -1.0}
cameraR:
location: {x: 0.02, y: 0.0, z: -0.5}
look at: {x: 0.0, y: 0.0, z: -1.0}Visualized: Instead using the following parameters, the optical axes become parallel: cameraL:
location: {x: -0.02, y: 0.0, z: -0.5}
look at: {x: -0.02, y: 0.0, z: -1.0}
cameraR:
location: {x: 0.02, y: 0.0, z: -0.5}
look at: {x: 0.02, y: 0.0, z: -1.0} |
Beta Was this translation helpful? Give feedback.
-
|
Hi Kim, Yes, the two cameras are currently in a toe-in configuration. Do you think this makes the tasks more difficult? |
Beta Was this translation helpful? Give feedback.
-
|
No, not really. I was just curious to know whether it was intentional :) |
Beta Was this translation helpful? Give feedback.
-
|
Well glad to hear that 😊. We just chose the toe in configuration for no particular reason other than maybe it giving better view on the DVRK stereo console. |
Beta Was this translation helpful? Give feedback.
Hello Yiwei,
Yes, the camera offset is going to remain constant throughout the 3 tasks. And that is correct, the
cameraLis 0.02 Simulation Units left of theCameraFrameandcameraRis 0.02 Simulation Units right of it in the y-direction.