Replies: 1 comment
-
|
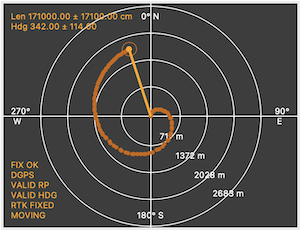
Hi @deavn2236, There's no 'off-the-shelf' solution for this in FYI the "Rover Plot" widget in the PyGPSClient GUI application does exactly this and presents the information the form of a location plot (the centre of the plot represents the base and the orange dots represent the rover vector and trace):
Suggest reading the u-blox interface documentation on the UBX-NAV-RELPOSNED message type e.g.: Hope this helps. |
Beta Was this translation helpful? Give feedback.
0 replies
Sign up for free
to join this conversation on GitHub.
Already have an account?
Sign in to comment
Uh oh!
There was an error while loading. Please reload this page.
-
The program you provided is very helpful for GNSS resolution. I have a question to ask.
I'm using the ZED-F9P for moving and rover positioning. I want to achieve positioning and orientation for a small vehicle with it. I use two ZED-F9Ps for interaction, as shown in the picture. How can I use this library to obtain GNSS position and the corresponding orientation of the two boards
https://content.u-blox.com/sites/default/files/documents/ZED-F9P-MovingBase_AppNote_UBX-19009093.pdf

Beta Was this translation helpful? Give feedback.
All reactions