Replies: 4 comments 4 replies
-
|
I have no experience with MuSHR and gazebo unfortunately. @planc509 would you have any ideas? |
Beta Was this translation helpful? Give feedback.
-
|
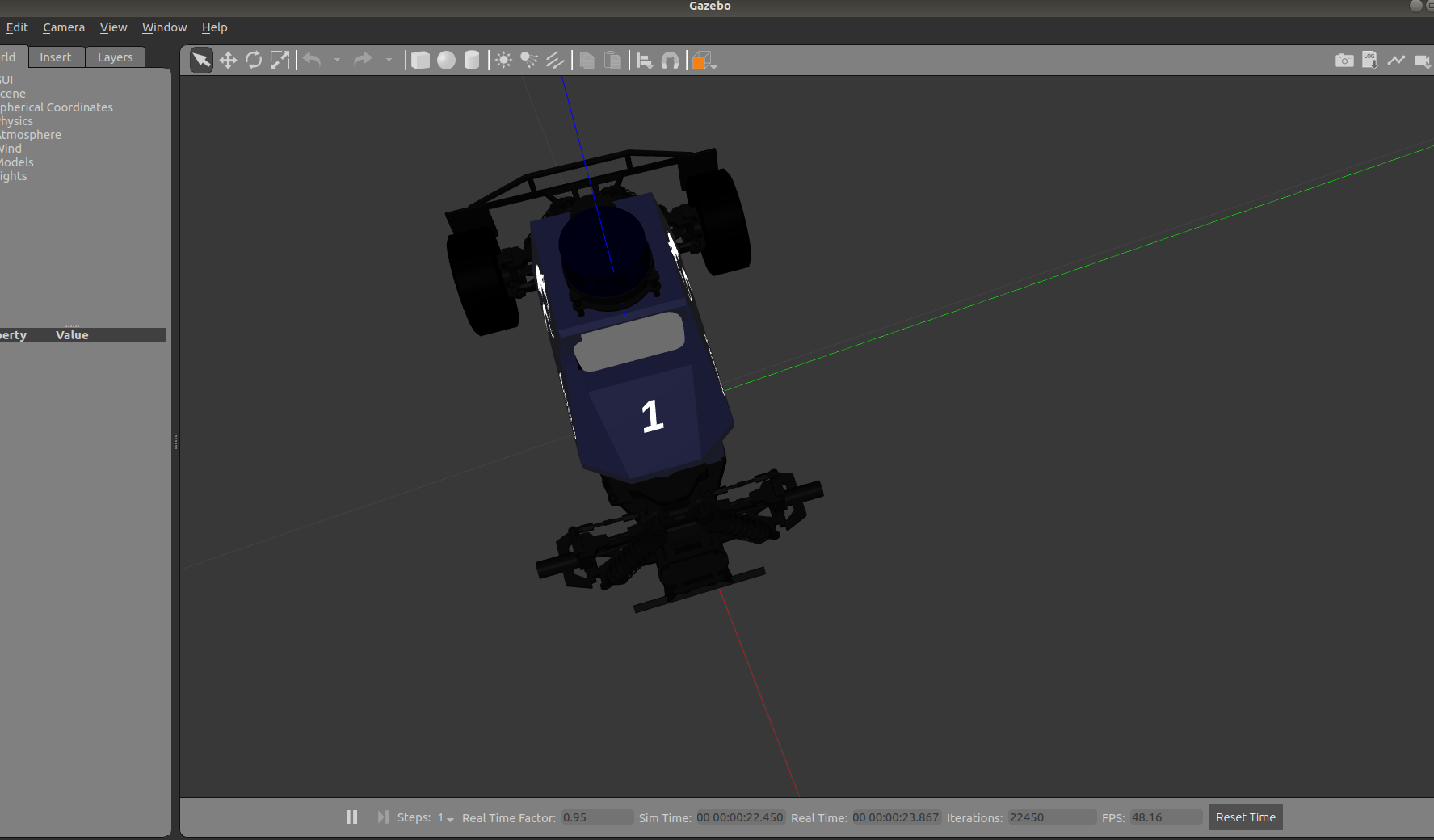
Hi @ArguiIm - Thanks for pointing this out. Gazebo requires all simulated links to have inertial params specified in the URDF, but some of the links associated with the front wheels didn't. I've added this to the URDF so the front wheels should now show up. Could you try the following:
Let us know how it goes. |
Beta Was this translation helpful? Give feedback.
-
|
Hey, thank you so much ! |
Beta Was this translation helpful? Give feedback.
-
|
Hey @planc509, www_screencapture_com_2022-3-17_11_01.mp4 |
Beta Was this translation helpful? Give feedback.
-
|
Hi @ArguiIm - I'm not sure what's wrong just from the video. If you'd like to post your code for teleoperating the robot I can take a look. |
Beta Was this translation helpful? Give feedback.
-
|
Hey, thank's a loot for your time. |
Beta Was this translation helpful? Give feedback.
-
|
I think the issue stems from the fact that, because MuSHR doesn't support Gazebo, we haven't tuned the physical properties of the MuSHR URDF. Specifically, all of the inertial values in the URDF are just placeholder values. There could also be issues with the collision meshes. I don't know if this will get fixed any time soon because for now we only support physics simulation in MuJoCo (which is now free: https://mujoco.org/). If you'd like to try that out, check out our tutorial for setting up MuSHR in MuJoCo here: https://mushr.io/tutorials/mujoco/. Sorry I don't have a direct fix for your problem. |
Beta Was this translation helpful? Give feedback.
-
|
Hey, thank's for your time and reply? |
Beta Was this translation helpful? Give feedback.
Uh oh!
There was an error while loading. Please reload this page.
-
Hello,
I'm new to ROS and Gazebo.
After following the tutorials, I needed to use mushr robots in Gazebo. Until now, I have the robot in Gazebo, but the simulator can't detect the front wheels, and this is the output I get. Did anyone encounter this issue before ? Or do you have any tips how to start using Gazebo with this robot files (mushr_description, mushr_base, mushr_realsense2) ?
Beta Was this translation helpful? Give feedback.
All reactions