Initial pose setting problem #28
Replies: 1 comment 29 replies
-
|
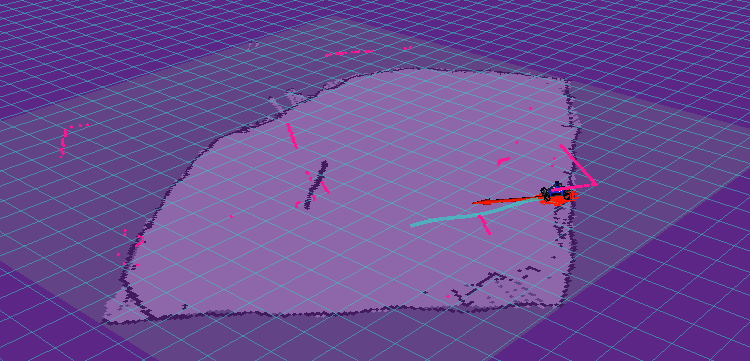
So after taking a look at the video it looks like your map doesn't line up with the room you are operating in. The navigation tutorial relies on mushr_pf which is a particle filter. The particle filter uses the laser scanner to localize (moving dots in your video). Basically it tries to match the current laser scan with the map of the environment. And since your map is of the track and not the room, the particle filter does not localize. To build a map of the room try out our new tutorial on map building . I'm assuming you are using the track map so that the rhc controller stays within the path. That makes a lot of sense, but you will need to have a separate map for localization (following the mapping tutorial) and for control (your current map) in order for it to work. So you will want to publish both maps with separate map_servers. This can be done by running |
Beta Was this translation helpful? Give feedback.
-
|
awesome, is there anything else causing trouble? I saw you mentioned something about the car sliding in rviz? That would likely be related to the particle filter |
Beta Was this translation helpful? Give feedback.
-
|
Thanks @schmittlema It is sliding. See video attached. but i am able to run the car autonomously. Pose.estimate.slide_480p.mov
|
Beta Was this translation helpful? Give feedback.
-
|
@schmittlema the only major problem i am trying to solve before i take this to street is the battery problem. nvidia jetson switches off after 1-2 min of charging battery. the converter shows 5V, but jetson struggles to keep up. have you guys had any issues with it. VESC and its battery seems fine. |
Beta Was this translation helpful? Give feedback.
-
|
Sliding problem:
Vesc problem:
|
Beta Was this translation helpful? Give feedback.
-
|
Understood. Yes the car is sitting the one corner connected to the power source since the battery is not working as expected. |
Beta Was this translation helpful? Give feedback.
Uh oh!
There was an error while loading. Please reload this page.
-
Hi,
I am currently studying Navigation Tutorial. I failed to set the initial posture of the car on the map. It will always change automatically. (Here are the screen vedio and real scene)

And (maybe because of the initial pose problem) I also can't set the goal pose.
Could you give me some suggestions on why it happened and how to fix it? Thank you!
Beta Was this translation helpful? Give feedback.
All reactions