simple_head_manager
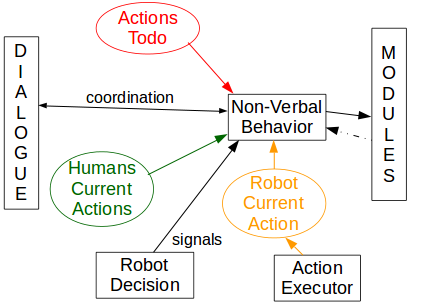
This module is a first simple version of the non-verbal behavior module. In the current supervisor version, only the robot head behavior is concerned, but other types of non-verbal behaviors can be envisioned.
- simple_head_manager/look_at: to use for the robot head to look at an entitity (object or part of a human body) (supervisor_msgs/String)
- /simple_head_manager/focus: name of the entity the robot is currently looking at (std_msgs/String)
- /action_executor/current_robot_action: current robot action (supervisor_msgs/Action)
- /human_monitor/current_humans_action: current humans actions (supervisor_msgs/ActionsList)
- /mental_states/previous_actions: previous actions of all agents (supervisor_msgs/ActionsList)
- /dialogue_node/isSpeaking: true is the robot is currently speaking (std_msgs/Bool)
- defaultTarget: name of the target to look at by default (string)
- speakingTarget: name of the target to look at whenever the robot is speaking (string)
- headJoint: name of the TOASTER joint for a human head (string)
- shouldMove: true if the robot should realy move its head (bool)(string[])