Welcome to the source repository for the KinIn framework's official documentation.
The complete documentation, including installation guides, API modules, and examples, is hosted on our GitHub Pages site.
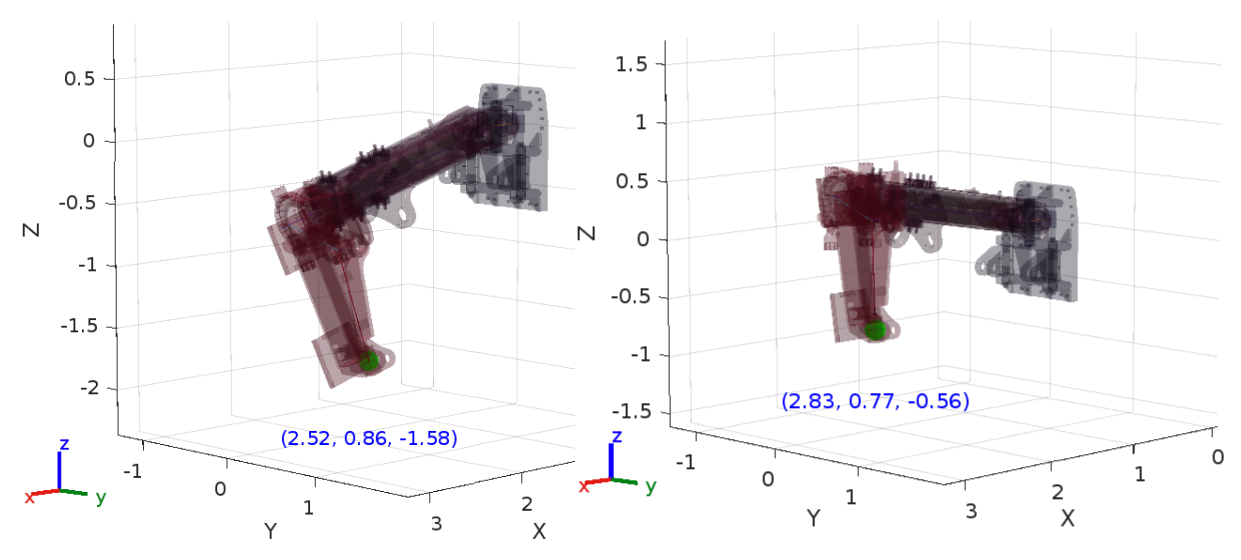
KinIn is a framework designed for the iterative kinematic analysis of mechanical systems. The primary objective of the software is to assess the feasibility of performing robotic calculations for complex mechanisms, particularly those with more than five degrees of freedom in heavy machinery. The approach employed relies on iterative computation methods rather than traditional analytical techniques to achieve the desired results.
- Getting Started: For installation and setup instructions.
- Examples: To see the framework in action.
- About: To learn more about the project's background.
This repository contains the source files used to generate the documentation site. If you find any issues or have suggestions for improvement, please feel free to open an issue or submit a pull request.