
![]()
Installation | Quick Start | Environments | Baselines | Citation
arXiv link: https://arxiv.org/abs/2408.11052
We provide blazingly fast goal-conditioned environments based on MJX and BRAX for quick experimentation with goal-conditioned self-supervised reinforcement learning.
-
Blazingly Fast Training - Train 10 million environment steps in 10
minutes on a single GPU, up to
$22\times$ faster than prior implementations. - Comprehensive Benchmarking - Includes 10+ diverse environments and multiple pre-implemented baselines for out-of-the-box evaluation.
- Modular Implementation - Designed for clarity and scalability, allowing for easy modification of algorithms.
After cloning the repository, run one of the following commands.
With GPU on Linux:
pip install -e . -f https://storage.googleapis.com/jax-releases/jax_cuda_releases.htmlNote
Make sure you have the correct CUDA version installed, i.e. CUDA >= 12.3.
You can check your CUDA version with nvcc --version command.
If you have an older version, you can create a new conda environment with the correct version of CUDA and JaxGCRL package using the following command:
conda env create -f environment.ymlWith CPU on Mac:
export SDKROOT="$(xcrun --show-sdk-path)" # may be needed to build brax dependencies
pip install -e . The package is also available on PyPI:
pip install jaxgcrl -f https://storage.googleapis.com/jax-releases/jax_cuda_releases.htmlTo verify the installation, run a test experiment:
jaxgcrl crl --env antThe jaxgcrl command is equivalent to invoking python run.py with the same arguments
Note
If you haven't yet configured wandb, you may be prompted to log in.
See scripts/train.sh for an example config.
A description of the available agents can be generated with jaxgcrl --help.
Available configs can be listed with jaxgcrl {crl,ppo,sac,td3} --help.
Common flags you may want to change include:
- env=...: replace "ant" with any environment name. See
jaxgcrl/utils/env.pyfor a list of available environments. - Removing --log_wandb: omits logging, if you don't want to use a wandb account.
- --total_env_steps: shorter or longer runs.
- --num_envs: based on how many environments your GPU memory allows.
- --contrastive_loss_fn, --energy_fn, --h_dim, --n_hidden, etc.: algorithmic and architectural changes.
Environments can be controlled with the reset and step functions. These methods return a state object, which is a dataclass containing the following fields:
state.pipeline_state: current, internal state of the environment
state.obs: current observation
state.done: flag indicating if the agent reached the goal
state.metrics: agent performance metrics
state.info: additional info
The following code demonstrates how to interact with the environment:
import jax
from utils.env import create_env
key = jax.random.PRNGKey(0)
# Initialize the environment
env = create_env('ant')
# Use JIT compilation to make environment's reset and step functions execute faster
jit_env_reset = jax.jit(env.reset)
jit_env_step = jax.jit(env.step)
NUM_STEPS = 1000
# Reset the environment and obtain the initial state
state = jit_env_reset(key)
# Simulate the environment for a fixed number of steps
for _ in range(NUM_STEPS):
# Generate a random action
key, key_act = jax.random.split(key, 2)
random_action = jax.random.uniform(key_act, shape=(8,), minval=-1, maxval=1)
# Perform an environment step with the generated action
state = jit_env_step(state, random_action)We strongly recommend using Wandb for tracking and visualizing results (Wandb support). Enable Wandb logging with the --log_wandb flag. The following flags are also available to organize experiments:
--project_name--group_name--exp_name
The --log_wandb flag logs metrics to Wandb. By default, metrics are logged to a CSV.
- Run example
sweep:
wandb sweep --project example_sweep ./scripts/sweep.yml- Then run
wandb agentwith :
wandb agent <previous_command_output>
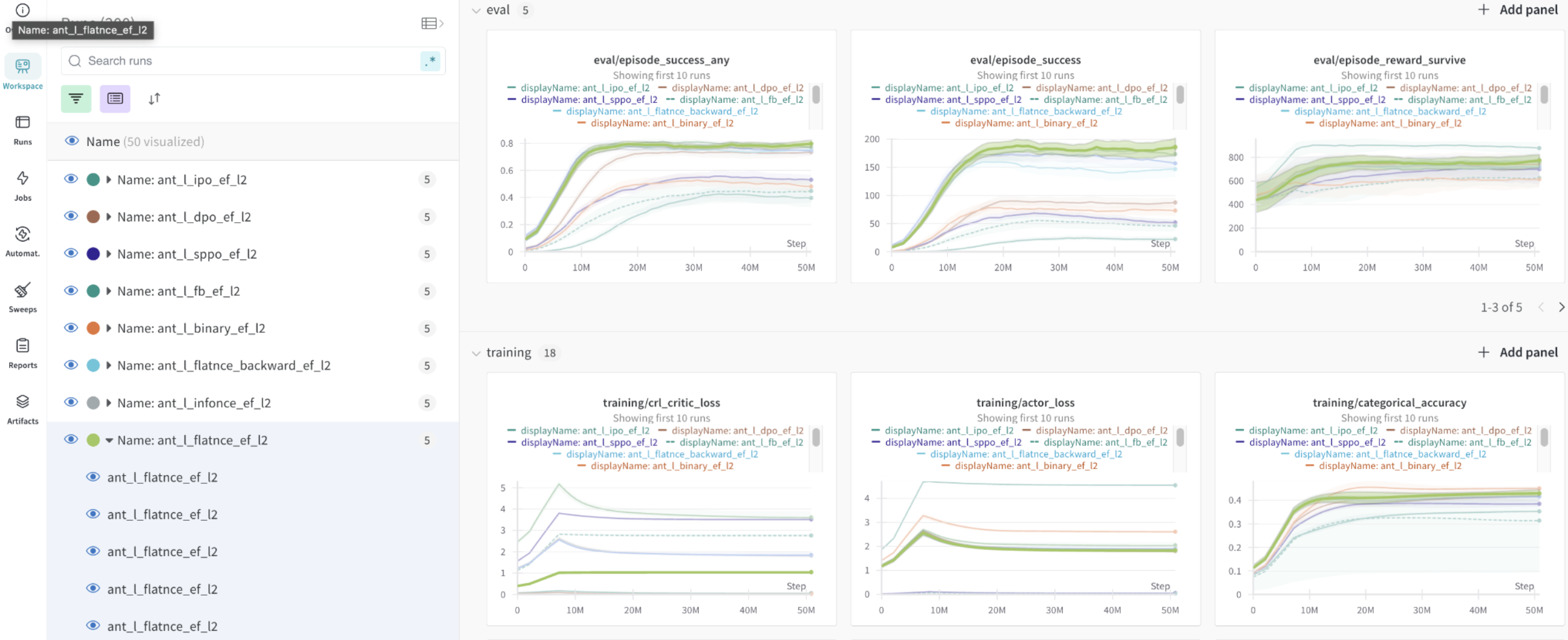
We also render videos of the learned policies as wandb artifacts.
We currently support a variety of continuous control environments:
- Locomotion: Half-Cheetah, Ant, Humanoid
- Locomotion + task: AntMaze, AntBall (AntSoccer), AntPush, HumanoidMaze
- Simple arm: Reacher, Pusher, Pusher 2-object
- Manipulation: Reach, Grasp, Push (easy/hard), Binpick (easy/hard)
| Environment | Env name | Code |
|---|---|---|
| Reacher | reacher |
link |
| Half Cheetah | cheetah |
link |
| Pusher | pusher_easy pusher_hard |
link |
| Ant | ant |
link |
| Ant Maze | ant_u_maze ant_big_maze ant_hardest_maze |
link |
| Ant Soccer | ant_ball |
link |
| Ant Push | ant_push |
link |
| Humanoid | humanoid |
link |
| Humanoid Maze | humanoid_u_maze humanoid_big_maze humanoid_hardest_maze |
link |
| Arm Reach | arm_reach |
link |
| Arm Grasp | arm_grasp |
link |
| Arm Push | arm_push_easy arm_push_hard |
link |
| Arm Binpick | arm_binpick_easy arm_binpick_hard |
link |
To add new environments: add an XML to envs/assets, add a python environment file in envs, and register the environment name in utils.py.
We currently support following algorithms:
| Algorithm | How to run | Code |
|---|---|---|
| CRL | python run.py crl ... |
link |
| PPO | python run.py ppo ... |
link |
| SAC | python run.py sac ... |
link |
| SAC + HER | python run.py sac ... --use_her |
link |
| TD3 | python run.py td3 ... |
link |
| TD3 + HER | python run.py td3 ... --use_her |
link |
The core structure of the codebase is as follows:
run.py: Takes the name of an agent and runs with the specified configs.
agents/
├── agents/
│ ├── crl/
│ │ ├── crl.py CRL algorithm
│ │ ├── losses.py contrastive losses and energy functions
│ │ └── networks.py CRL network architectures
│ ├── ppo/
│ │ └── ppo.py PPO algorithm
│ ├── sac/
│ │ ├── sac.py SAC algorithm
│ │ └── networks.py SAC network architectures
│ └── td3/
│ ├── td3.py TD3 algorithm
│ ├── losses.py TD3 loss functions
│ └── networks.py TD3 network architectures
├── utils/
│ ├── config.py Base run configs
│ ├── env.py Logic for rendering and environment initialization
│ ├── replay_buffer.py: Contains replay buffer, including logic for state, action, and goal sampling for training.
│ └── evaluator.py: Runs evaluation and collects metrics.
├── envs/
│ ├── ant.py, humanoid.py, ...: Most environments are here.
│ ├── assets: Contains XMLs for environments.
│ └── manipulation: Contains all manipulation environments.
└── scripts/train.sh: Modify to choose environment and hyperparameters.
The architecture can be adjusted in networks.py.
Help us build JaxGCRL into the best possible tool for the GCRL community. Reach out and start contributing or just add an Issue/PR!
- Add Franka robot arm environments. [Done by SimpleGeometry]
- Get around 70% success rate on Ant Big Maze task. [Done by RajGhugare19]
- Add more complex versions of Ant Sokoban.
- Integrate environments:
- Overcooked
- Hanabi
- Rubik's cube
- Sokoban
To run tests (make sure you have access to a GPU):
python -m pytest @inproceedings{bortkiewicz2025accelerating,
author = {Bortkiewicz, Micha\l{} and Pa\l{}ucki, W\l{}adek and Myers, Vivek and
Dziarmaga, Tadeusz and Arczewski, Tomasz and Kuci\'{n}ski, \L{}ukasz and
Eysenbach, Benjamin},
booktitle = {{International Conference} on {Learning Representations}},
title = {{Accelerating Goal-Conditioned RL Algorithms} and {Research}},
url = {https://arxiv.org/pdf/2408.11052},
year = {2025},
}If you have any questions, comments, or suggestions, please reach out to Michał Bortkiewicz (michalbortkiewicz8@gmail.com).
There are a number of other libraries which inspired this work, we encourage you to take a look!
JAX-native algorithms:
- Mava: JAX implementations of IPPO and MAPPO, two popular MARL algorithms.
- PureJaxRL: JAX implementation of PPO, and demonstration of end-to-end JAX-based RL training.
- Minimax: JAX implementations of autocurricula baselines for RL.
- JaxIRL: JAX implementation of algorithms for inverse reinforcement learning.
JAX-native environments:
- Gymnax: Implementations of classic RL tasks including classic control, bsuite and MinAtar.
- Jumanji: A diverse set of environments ranging from simple games to NP-hard combinatorial problems.
- Pgx: JAX implementations of classic board games, such as Chess, Go and Shogi.
- Brax: A fully differentiable physics engine written in JAX, features continuous control tasks.
- XLand-MiniGrid: Meta-RL gridworld environments inspired by XLand and MiniGrid.
- Craftax: (Crafter + NetHack) in JAX.
- JaxMARL: Multi-agent RL in Jax.